�y�g���N�z�@���[�^�[���ł����k���@�y��]���z
�� ���̃X���b�h�͉ߋ����O�q�ɂɊi�[����Ă��܂�
.
�@�@�@�@��__�ȁ@�@�@�@�@�}�u�`���[�^�A�X�e�b�s���O�A�u���V���X�AAC�T�[�{
�@�@�@�i�@�L�́M�j�@�@�@�@���[�^�[�Ɋւ��邱�ƂȂ牽�ł�����Ă��������B
�@�@�@(�@O��O
�߁�-�RJ�����@�@�@�@�@�d�C�Ȃ̂ɁA�ӊO�ɂ����������̂ŁA���Ă܂����B
�@�@�@�@�@�@�@�@�@�@�@�@�@��������}�ł��B�N�����ő��œ����Ă���܂��B >>562
�ǂ����ł��B
�����]�����m��
��]�q��]�����m��
����@���@���@�i�m���|�m���j�^�m���@�E�E�E(����T�F�P�O�t�߁j
>>�T�T�X�̒l�Ă͂߂Ă݂��
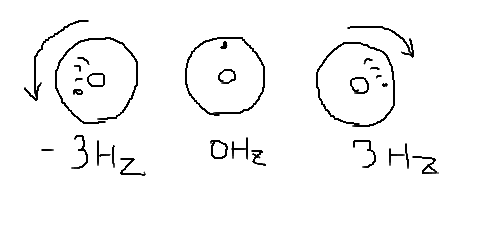
�U�����[�^�[�łRHz��]�ʼn�]����������Ă��鎞�@�@���@�m�����R
��]�q���R�g���̂Ƃ��@�����i�R�|�R�j�^�R���O�@����̓[���ł��ˁB
��]�q����~���Ă��鎞�A�����i�R�|�O�j�^�R���P�A����͂P�ł��ˁB
��]�q���|�R�g���̂Ƃ��A�����i�R�|�i�|�R�j�j�^�R���U�^�R���Q�A����͂Q�ł��ˁB
>>559�̒l�ł����Ă���悤�ł��ˁA
���肪�Ƃ��������܂����B �}�C�i�X�̎��g���ĕ����I�ɂȂɁH
����������
�}�C�i�X�̎��g�����ăt�[���G�ϊ��̂Ƃ��ɕ\��鋤���ȕ��f���ł����������Ƃ��Ȃ� Nr���}�C�i�X�̂Ƃ����āA
Ns���}�C�i�X���� ��]�̌����Ł@�{���@�|���@�ȁA�ƁB
 ������Ns���t�����ɐi�ގ��E�����Ă�Ȃ�ANr���t�ɂȂ邾�� �킩������A���Ⴀ�b�b�v�R�g���ʼn�]���Ă���ϑ��n�ŕ\�����Ȃ����o������f����H
������Ns���t�����ɐi�ގ��E�����Ă�Ȃ�ANr���t�ɂȂ邾�� �킩������A���Ⴀ�b�b�v�R�g���ʼn�]���Ă���ϑ��n�ŕ\�����Ȃ����o������f����H
�U�����[�^�[�łb�v�UHz��]�ʼn�]����������Ă��鎞�@�@���@�m�����U
��]�q���b�v�U�g���̂Ƃ��@�����i�U�|�U�j�^�U���O�@����̓[���ł��ˁB
��]�q���b�v�R�g���̎��A�����i�U�|�R�j�^�U���P�^�Q�A����͂O�D�T�ł��ˁB
��]�q����~���Ă���Ƃ��A�����i�U�|�O�j�^�U���U�^�U���P�A����͂P�ł��ˁB�@�@�@����H�I�i�O���O�G�j >>568
�E�E�E��]����Ɉ˂炸�O�͂Ŗ������t��]�����Ă����Ԃ�z�肵�Ă��܂��E�E�E �X�e�b�s���O���[�^�[��
http://akizukidenshi.com/catalog/g/gP-05710/
�u���b�h�{�[�h���PIC�A�g�����W�X�^�A�_�C�I�[�h���g���ē������Ă݂��炤�܂������܂���
������
�W�����V���N�^�C�v�c�l�n�r�g�����W�X�^�A���C�@�s�a�c�U�Q�O�W�S�`�o�f
http://akizukidenshi.com/catalog/g/gI-12536/
�����������������ƊȒP�ɂł������ȋC�������ł����A�ǂ��Ȃ�ł��傤���H
�Ȃk�d�c�Ƃ��p�݂����Ȃ�ł���
���[�^�[�̋쓮�d����7.5�u�قǂł��B �Ƃ���Łd�A
�Ȃ�Ŋ���1�̂Ƃ��Ƀg���N���ő�H ��ᐄ�ڂŃs�[�N��S=1�̂Ƃ���ɂȂ�悤�ɐ���ł������̂͂Ȃ�����ˁH
 ���ȏ�������������������������Ă��� ���낢���ς���
���ȏ�������������������������Ă��� ���낢���ς���
��������C��������悢�� ���[�^�[�Ȃ�ĂقƂ�ǐG�������ƂȂ��Čv�Z�Ƃ����������̂����Ō���Ă�X�� >>564
-3Hz�͎��E��]���x�Ƌt��]���Ă��邱�Ƃ�\���Ă���Ǝv�����ǁA
���̎��̂��ׂ�l���`����Ӗ��͂���̂��͂�����Ƌ^�� ���ׂ肪1������A
�u���ׂ���Ă������x������˂����I�v
���Ă��Ƃ��킩����ĈӖ����炢 ���x����ŃI�[�o�[�V���[�g���������Ȃ��ꍇ�API���䂾�Ɖ������]���ɂ��Ȃ��Ɩ����H
���x�T�[�{�ш�͓d���ш��1/5���炢��P�Q�C���ݒ肵�āAI�Q�C���͍X��1/10�Ƃ��Ă�B ��������S���]���ɂ��������Ɛϕ��̌W�������������ăI�[�o�[�V���[�g�}������Ȃ�
���������g������Ȃ�Ă��̐��ɕK�v�Ȃ����ɂȂ�H ���������Ȃ��Ȃ�P�����ŃX�p�b�ƌ��܂邾�낤�� ������ĉ��������]���ɂȂ��ĂȂ����Ď��Ȃ́H
�e�������Ȃ����Ă�������� �Ԃ����Ⴏ�����햳���Ă��Ȃ�Ƃł��Ȃ� �V�~�����[�V�����Ɉʒu������ꂽ���`����̏I���ŃI�[�o�[�V���[�g�����ď�肭����ł��Ȃ�
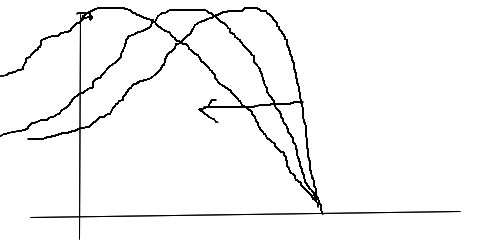
�I�[�o�[�������Ēv���I���Ǝv�����ǁA�ǂ����Ⴂ���H ��`�̖ʐς��ړ����������ė������Ă邩�H
�c��̋������킩��Ō�̎O�p�`�̌`���m�肾�� ��ʓI�炵���H�������[�g�A�ړ������A�ō��������`���x�p�^�[�����߂āA�G���R�[�_�J�E���g���Z�����ʒu�w�ߍ���Ă���ǂ��ꂾ�ƑʖځH
�����I���łƌ����I���ňʒu�������ˏオ��
�ʒuP�����xPI�Ƃ��Ă� �I�[�o�[�V���[�g�����Ȃ����Ȃ�Q�C�������邾�����Ǝv����
���ɐϕ��� �����I���ňʒu�����鎞�_��
�w�ߒʂ�������ĂȂ�
�ނ���ϕ����߂ŁA�����x���グ��
�����I�����̈ʒu�����k�߂Ȃ��Ƃ����Ȃ�
>>588�A589�͑f�l >590
�x��ĒǏ]��������I�[�o�[�V���[�g���Ȃ���Ȃ��̂��ȁ`�H �܁A���낢�낢�������Ă���Ă݂�����킩�邳 >>591
�x��ĒǏ]���Ă鎞�_�Ń_������
�Ӗ��킩���ĂȂ�����H �Ă��ǂ�Ȃ�PI(D)�Q�C���Ŋ撣�낤��
�ő�g���N���������[�����g�������x�������Ȃ邱�Ƃ͂Ȃ��B
��̖ڈ��l >593
�ʒu��P�ő��x��P+�アI��������x��Ă��I�[�o�[�V���[�g���Ȃ���Ȃ��́H ���x���I�[�o�[�V���[�g���Ȃ����Ă��Ƃ͑��x�w�߂ɑ��Ă��Ȃ�x��Ă��������ǁA���K�������́H
��`�������͑��x�x��ňʒu��+��A�������͕ς�炸�A�����J�n���͈ʒu�����������Ȃ�܂Œx��Ă��猸���J�n�����x�����x��ňʒu��-��݂����Ȋ����ɂȂ肻�� �������͈ʒu���c�����܂܈ێ����Ă���Ă��Ƃ����
�d�Ԃ�GO�I����Ă�
1�q�x��ő����Ă�̂Ɍ����J�n�܂ňʒu���Ȃ��łǂ�����́H
���A�Ȃ�ŗ\��ʂ�����ł��Ȃ��́H
P�Ƃ�PI���O�ɉ��������������� >>594
�́H
��`�J�[�u�Ǝ����x���������Ă���
�ϕ��Q�C���Ŏ����x���グ����Ă̂�PID�̐ϕ����Ȃ��H
�f�l���� >>598
��1�q�x��ő����Ă�̂Ɍ����J�n�܂ňʒu���Ȃ��łǂ�����́H
���m�R���̔ނ������l���Ă��̂��ȁE�E�E >>598
>>587�̑��x�p�^�[�����������炷��ƍō��������Ă���ۂ����瓙����=�ō����ŕ�������
�C�i�[�V���ł��߂����łȂ��H ���������ʒu���Ő��䂵�Ă�
���������Ēv���I�Ȍ��ׂ�
�������x������ɂ������Ĉʒu���O�Ŏ~�߂�悗
�Ȃ�ňʒu������H �O�a���Ă邯�ǃA���`���C���h�A�b�v�������Ƃ��B �����N�挩��Ɗ�{�͑��x����݂̂��ď����Ăď���������
���[�v��ւ��Ă�̂� ����A���ʂɍl���Ĉʒu���Đ��䂷��Ӗ��ˁ[����
���O�A�d�Ԃ�GO�I�^�]����Ƃ���
�w�܂ł̋����ɂ���ăA�N�Z������ς��邩�H
�ō����ɒB���Ȃ������Ȃ�ʂ����A�W�ˁ[����H
�����ő�`�̌`���m�肳���đ��x����Ȃ�
�ʒu����̂̓z�[�������Ď~�܂�Ƃ�������
�c�苗���ɔ�Ⴕ�����x�ɗ��Ƃ����� ���₵���l����̃R�����g2018/11/29 22:00:05
���肪�Ƃ��������܂����B
��ւ��^�C�~���O��������ł��ˁB
�ق�ƁA�o�J������ ���x����ւ̎w�߂��ʒu����Ȃ���\������������ ���x���[�v�̍œK�Q�C���͋@�B���̏���(��ɋ@�B�萔)�ŕς���Ă��܂����߁A��o���Ȃ��B
�g�`�̉�������n���ɍœK��T���Ă������� �C�i�[�V�����ĉ����x�Ɠd������v�Z����ƃm�C�Y�������Ēl������ǂǂ�����Đ��肷��́H�R�M���O�傫���ƍX�ɒl��Ԃ� �Ȃ�ʼn����x�Ɠd������v�Z����́H
�A�z�Ȃ́H �^�]���ɂ���ȊO�Ő��肷����������Đ搶 ���א���͓����Č����������삾��
����ƌ�����614�͋�̓I�ȃ��[�h0���� >>617
��̓I�ɉ��������|�����ł����H
(��) ���U�Ń}�E���g���킷��ȉ��ǂ��z�� �t���f�����琧��n�������������Ƃ͂Ȃ���
�X�e�b�v�����݂Č��߂Ă�� �U�����[�^�̃x�N�g��������āA���[�^�̃C���_�N�^���X����Ȃ��ĘR��C���_�N�^���X���K�v�Ȃ�ł����H
����Ƃ��O�H�̃C���o�[�^�̃��[�^�萔������Ƃǂ���C���_�N�^���X����Ȃ��ĘR��C���_�N�^���X���p�����[�^�Ƃ��Ă���̂ŁB
�T�[�{�̃x�N�g���������{�ōl���Ă��܂��Ă���̂ŃC�}�C�`�s���Ɨ��Ă��܂���B �Ԃ����Ⴏ�{���v���
����ƎO�H�̋Z�p�͂��V���{������ ���@�Ɛ��w���f���̍����o�����ŘR��C���_�N�^���X�̂����ɂ��Ă邾��
����Ȃ���{���̓K�`�ŗv��Ȃ� ���[�^����ň����O�H��荂���Z�p�������Ă��Ђ��Ăǂ�������� ���[�^�[�̉�Ђɂ����ł���
���[�^�[�̃C���o�[�^�[�t�߂̉�H�}���ǂ߂܂���
FET�ŃX�C�b�`�J�p�J�p���ăR�C���ɓd���𑗂荞��ł�Ǝv����ł���
��R��R���f���T�̑I��͂ǂ�����Ă�������ł��傤���c >>626
�܂��A�R�C���ɗ����d�����ǂ�����Ηǂ�����ǂ��l����B
���ꂩ��A�ψ��A�ψ��A�T�C�Y�A�R�X�g�A�M�����̂��Ƃ��ǁ`��
�l���đI�肷�������Ȃ��� �~ �ψ��A�ψ�
�� �ψ��A�ϔM�A���M �ŋߊC�O���[�J�[�̃T�[�{��I�肵�ĂċC�Â������ǁA�T�[�{�Ƃ����U�����[�^�����j�A���_�C���N�g�h���C�u����������d�l�̋@�킪�����ċ�����
������낤�Ǝv���ł��邾�낤���ǎd�l�Ƃ���搂��̂��������Ƃ������E�C����� �H�H�H
�����̔ėp�C���o�[�^�Ȃ�\�ł��� �����p���[��H���L����
����͂��܂��݂����Ȃ���
�Ȃ�ł��o����@����̂͊ȒP
�����������������[�^�[��������Ďg�����[�U�[�Ȃ�Ă��Ȃ�����
���v���Ȃ� ���[�^�̕����萔�����Ă��d�����͂̉�������p�����[�^����ł��邩��ȁB
���[�^�̃Z���T���X�����e�Ղɉ\ �Ƃ�����>>631�͎Г��Z�p�͂���Ă�ɓ������B
�����̊�Ƃ����肪�\���� ���܂����炯�̉����Z�p�͒��Ƃ�
�܂Ƃ��ȋZ�p�����ɖ����Ƃ������낗 ���[�^�̉�]��(�ʓd��)���R�M���O�g���N�̉e�����Ă����ł����H
�Ă�����ʓd���Ă�Ƃ��̓R�M���O�g���N�͑��݂��Ȃ��Ǝv���Ă���ł����ǂ�������Ȃ������Șb�����ɂ����̂� ��d�����Ȃ�R�M���O�g���N�̉e������B
�܂��܂��d�����ꂽ��g���N���b�v��(���Z��)���x�z�I�B �g���N���b�v����2�������͎��C���d����3�������g�̃A���o�����X�������B
6����5,7�������� ���Ȃ݂Ƀg���N���b�v���̓��[�^���L���[��X�e�[�^�X�L���[���������Ώ����Ȃ��� ��Ђ̋@�B�̃��[�^�[�̎��Ƀv�[���[���t�����
�Q�������l�W�ŌŒ肷����́A�Е��̓l�W�p�̉������Ă��邩����܂Ȃ�
�����Е��̃l�W�����镔���͉~�̕����Ƀl�W�����邩��悭���ނ̂��
T ���ׂ̍������`�ł������߂Ă���ǂ�
���Ƀ��`�F�b�g�şӐg�̗͍��߂�Ɛ܂�邩�r�߂������������ĂȂ����� ���[�^�[�Ƀo�C�u�t������傩������ 200V60Hz�n��d�l�̃��[�^�[�@���50Hz�n��Ő���Ɏg���ɂ�
�O��200V�ɎO�H������̃C���o�[�^�[�i���[�^�[�̂Q�A�R�{���炢�̏o�͂́j��
�ʂ��ďo��60Hz�ɂ��ă��[�^�[���Ȃ���悢�ł����H �����g����60Hz�Ȃ炻��ł����ł� ���b�e�V���[�^�[�ɂ́A�ǂꂮ�炢�̌�����Ђ悤�Ȃ̂ł����B �����24bit�̃T�[�{���邯�ǐ��������܂ŕK�v�Ȃ̂��Ƌ^��Ɏv�� 48V�`100V���x��20HP�ȏ�̃u���V���X�����̖������ˁB 100V�Ȃ�AC���[�^�[�ł�������� >>652
����̐l�Ԃł͂Ȃ��ł����A
����܂��B
24bit���邩�炱���o���邱�Ƃ����� 24bit���ăp���X�o�͊�łǂ�����Đ��䂷��� �����6000rpm�ʼn�قǃp���X�o����@�킠��́H �� ���̃X���b�h�͉ߋ����O�q�ɂɊi�[����Ă��܂�



