�y�g���N�z�@���[�^�[���ł����k���@�y��]���z
���X����1000���Ă��܂��B����ȏ㏑�����݂͂ł��܂���B
�뎚����
�~ �g���N�搔
�Z �g���N�萔 �悭�A��ʂ�SPM���[�^�̓����N�^���X�g���N�������Ȃ��A�ʋɐ����Ȃ�(Ld��Lq)�ƌ����Ă��܂����A����v��������E�\�ł́H�Ǝv���Ă��܂��B
�Ⴆ�A�P����SPM�̃����O�����[�^�œd���ʑ��i�߂�ƃg���N���A�b�v���܂��B
�܂��A�����O���̃��[�^��LCR���[�^�ŃV���t�g�Ȃ���C���_�N�^���X���肷��ƁA���l�ɂȂ�܂���B���������̑傫���Ŗ������܂��B(Ld��Lq) �܂��A�Q�l���Ȃ̎��C��H�@������ƁA�C���_�N�^���X�����߂�ہA���̂�������������f���ŃC���_�N�^���X���v�Z���Ă��܂��B
���̌v�Z�̌��ʁALd��Lq�ƂȂ�܂����A������ꂽ���f���ŁA���C��H�@�ɂăC���_�N�^���X�����߂�ƁALd��Lq�Ƃ������ʂɂȂ�܂��B SPM���[�^�͓ʋɐ����Ȃ�(Ld��Lq)�Ƃ����b�͉��������Ɍ����Ă�̂ł��傤���H
�����̒����I�C���[�W����s���������Ȃ̂ł́H
�Ǝv���Ă��܂��B ���[�^�͈�l�̈̑�()�ȋ��������_�̍�����������Ƃ���Ă���B
���̈̑�Ȃ����̗����������Ɛ������Ƃ���A�ԈႦ�Ă镔�������\�N�C������ĂȂ� �Â��̋@�B�̃R���v���b�T�[�̒P�����[�^�[���M���Ȃ�
���o���Ǝv���Ē��Õi�Ɍ������Ă��G��Ȃ����炢�M���Ȃ�
�Ă����ɉ���Ă邩�炱����������Ȃ̂���
�W���ŕt���Ă�v�[���[���傫���^�C�v�ŕ��ׂ͂������Ă邩���m��Ȃ� >>36
�G��Ȃ����炢�M���Ƃ�������邪�A50�����x�ŐG��Ȃ����炢�̔M���ł���B
�P�����[�^�[�Ƃ��Ă�50�����炢�͈�ʓI�ɂւ������ȉ��x�ł���B
�R���v���b�T�[�͋�C�����k����۔M������̂ŁA���̔M�����[�^�[
�ɓ`����Ă���\��������B�ƒ�p�i�Ȃ�q�����G���ĉΏ���������
�܂������A�H��@�툵���Ȃ̂Ő���͈̔͂̂悤�ȋC������B
�S�z�Ȃ�R���v���b�T�[�̃��[�J�[�ɖ₢���킹�Ă݂�ׂ��B >>34
���Ԃ�ˋɐ�����ʂ��SPM�ł�����B���x�̖��B
�Q�l�����ԈႦ�Ă� >>32
�ǂ̂��炢�g���N���A�b�v�����̂��ȁH
���Ƃ��ƃY���Ă��Ƃ��B ���������肵�Ă��ĕ\�ʒ��t���[�^��Ld��Lq����v���Ȃ��Ƃ悭�v�� ���ɐ^�~�x�̍�������Ld��Lq�̔䂪20�`30��������邱�Ƃ͂Ȃ��B
�C���_�N�^���X�̓R�C���̊����̓��ɔ�Ⴗ�邩��A�������傫�����^���[�^�قnj����ɍ����o��Ǝv���� >>38
50���̃��[�����͂ʂ�߂��邪�A50���̕��C�͔M���ē���Ȃ����B >>42
�����O���Ύg�p�����������@�������ĂȂ��Ƃ��̉͌�����o�Ȃ��̂ł́H
�^�~�x������Ă�Ƃ́A���������Ɍ����Ă�̂ł��傤�H >>33
�����������ƕ�������
�m���ɗ��_�I��Ld��Lq����v���Ȃ��� �m���Ƀ����O�}�O�l�b�g���Ǝ��C��R�͍\���I�ɕς�����
�����Ɏ莝���́�60��������15%����Ă�
�����Ō��܂�? �����Ƃ��ŕς��\���͂���B
���ǁA����ȑO�ɎQ�l���̎��C��H�����������B
����莥�ΗL��A���A�R�C���ɓd���������ꍇ�A�����ۑ������藧���ĂȂ��B ���[�^�̎Q�l���Ȃ�ĉ��肩��X�^�[�g���ĂāA���̉��肪�����Ă邩�ǂ����̌����Ȃ��B
�����͂��ꂢ�Ȉꎟ�����g�����肵�A�C���_�N�^���X�͓����g������A
���̌��ʁA�g���N�̓}�O�l�b�g�g���N�ƃ����N�^���X�g���N�ɕ����邱�Ƃ��o���܂��A���x�̓��e�����Q�l���ɂ͏�����ĂȂ��B
>>43,47�Ȃ�čl�����ꂽ���Ƃ��������̂��낤���H �C���_�N�^���X�͖{���ɓ����g�ƂȂ�̂��H
IPM���[�^��SPM���[�^���Ԓ[�q��LCR���[�^�t�����܂܁A�������V���t�g���ƃC���_�N�^���X�͈ꎟ�����g�ɂȂ���ǁA����̓��[�^�����������̂��H >>34������B
�w�����I�C���[�W����s���������ŁA���������̉��肪�����ĂȂ��̂ł́H�x Renesas���[�^�[����L�b�g�ɓ�������Ă�nidec(�����{�T�[�{)���[�^�̒��C���_�N�^���X��Ld=Lq�������� >>53
���ꃂ�[�^�̊������́H
�������̓��[�^�̑傫���́H
������x�̑傫���ɂȂ�ƃ��[�^�̊������͏\�^�[�����x�B
�����ȃ��[�^�͋N���͉҂����ߐ��\�^�[���`�S�^�[�����z������̂�����B �e�����莝���̃��[�^��>>50���m�F���Ăق����ł��ˁB
���[�^���x�͂₢�ꍇ�A�U�N�d����LCR���[�^��ꂿ�Ⴄ���璍�ӂ����� �ȂJ�^���O�d�l����w
�Ԃ����Ⴏ���b������Ƃ����̉�ЁA>>43�̃��[�^��Lq=Ld�Ƃ��Ĕ̔����Ă���
�����͓��ɂ���Ŗ��Ȃ�Ȃ��� �C���o�[�^�[���ĎO���𗬂��o�͂��邯�ǁA�����I�ɂ͉������ɂȂ�́H
�X�^�[�H�f���^�H �����C�ɂ��Ă���̂��킩��A�C���o�[�^�[�̓����\�����X�^�[�ł��f���^�ł��o�Ă���O���𗬂͓������Ǝv���̂����B
���ׂ��X�^�[�ɂ��邩�f���^�ɂ��邩�͕��ׂ̂Ȃ�������B �f���^�����ɂ���ƃX�^�[�����ɔ�ׂĐ��a���ׂ��ł���Ƃ����͉̂��ɂ���?
�����ɂ�銪����R�l�̂͂Ȃ��H ���������̃j�N�������œ����d�͂̃R���������b�Ɖ��肷���
�f���^�����̕����ׂ��j�N�������ɂł��܂��ˁB �f���^�̕����R�C���[�d���������� �ł���Ƃ��������Ȃ��Ɠ�������d�͂ɂȂ�Ȃ��H ���j�[�N�Ō��I�Ȋm���҂���K�C�_���X
�ɂȐl�͌��Ă݂�Ƃ�����������܂���
�O�[�O���Ō�������Ƃ��������w�l�b�g�ʼn҂����@�@���j�A���t�k�m�x
QQCNJ �ׂ��o�����Ȃ��āA�ׂ����Ȃ��Ɗ������~�d��(�N����)���҂����ő�g���N���傫���Ȃ�Ȃ�
�܂��A�킴�킴�f���^�ɂ��č����d�l�ɂ��Ă�̂ɂ�芪�����R���悭�킩���B
�f���^�̃����b�g�͗U���@�ł̃X�^�[�Ƃ̐�ւ� �C�~�t
�X�^�[�N���������R�C���̂܂܂ŏo�͉����ēd���}���Ďg�����̂Ȃ̂�
���̐����Ȃ�^�t���� >>69���C�~�t
�X�^�[�͗U�N�d��(�g���N�萔)�オ�������ő�g���N���o�����߂Ɏg�p���� �X�^�[�N�����g���N�d�������āH
���w�Z�����蒼���o�J �U���d���@�̎n�����͌Œ�q�����̌������X�^�[�����ɂ��āA�ʏ�^�]���ɂ̓f���^�����ɂ��邱�ƂŁA�n���d����1/3�ɐ������邱�Ƃ��ł��A�n���g���N��1/3�ɂȂ�܂��B �U�N�d���̓����l�����70�͓��R�̘b���Ǝv������ �X�^�[�͍ŏ��̓d���ōő�̃g���N���o�����߂Ɏg�p���邾�� �t�N�d�����Ăǂ�����ăI�V���ő��肷���ł����H
�X�^�[�����̏ꍇ�A�����_����Ƃ����瑪��ł��܂����
�f���^�����̏ꍇ�A���ԓd����������ł��Ȃ������ł��� �m���Ă邢���狳���ė~��������
�̂ǂ����̑�w�̋����H�̕���
���d�p�Ƌ쓮�p�̃��[�^�[�͂��ꂼ������̈�H���Ⴄ����P�ɂ��������������ǂ�
�ƕ������ׂ��ɏڍׂ������Ē����܂���
�m���쓮�p�̃��[�^�[�d�p�Ƃ��Ďg�����1.5�{���炢�Ⴄ�Ƃ��ǂ��Ƃ�
�����������͑S�����������������̂Řb�����ŕ����Ă��܂���
���X�ł����A�Ȃ������������������ǂ��̂��ڍו�����������Ă������� �ꏏ����
�͗������ƒ����ł������ ����H���ǒN���m��Ȃ��̂��c�c�O�c �X�e�b�p�[���N���[�Y�h���䂷��ƃI�[�v����荂��]�ʼn邯�ǁA�t�N�d���Ƃ��ǂ��������Ă�̂���
�d���d�����ȒP�ɒ�����Ǝv������ >>86
�d���t�B�[�h�o�b�N�����牽����������́H
�C���o�[�^�[���o�͂ł���d���͕ς��Ȃ��� ���[�^�[�̃g���N�͓d���ɔ�Ⴗ��B
���͉��x�Œ�R�l���傫���ς��B
���d���t�B�[�h�o�b�N����ƃg���N������x�𐳊m�ɃR���g���[���ł���B >>86
IPMSM�̎�ߎ�������݂����ɋt�N��}������@������́H �y�A�o��U��A��JPop���z�@TK�������A�I��点���̂́A�ꔭ���́A�F���c�ł͂Ȃ��A���̎��g��������!?
http://rosie.5ch.net/test/read.cgi/liveplus/1528249499/l50 >>81
�ȒP�Ɍ�����
�����쓮���Ɣ��d���ɐ�ւ���ۂ̃��X���L�邩�炻�̕����Ȃ�
����ł�1.5�{�Ƃ܂ł͂������Ȃ����� ��������̃��[�^�[�o�v�l�œ������Ă���lj�]����������
��]���x�����ǁA�p���t���Ȃ�Ă�����]���͂ǂꂭ�炢����
���ꂩ�����m�b��
�Ƃ肠�����́A�P�O�O�g�����炢�ł܂킵�Ă���� �����Ă���Ӗ����킩����
duty������悭�ˁH
�Ⴕ���͒x�p�ʓd���邩 >>95
duty��������[�^�[�����Ȃ��Ȃ���
��������������邵
�܂��M�A�䂪��肠����ǁA�o�v�l�łȂ�Ƃ��Ȃ�ȂƎv�������ǖ����� >>96
���[�^�[��DC? BLDC?
�M�A�̕��ׂʼn��Ȃ�(�N�����Ȃ�)���Ă��Ƃ����ǁA���[�^�[�P�̂Ȃ�d���ɔ�Ⴕ�ĉ��̂��ȁH
���邢��100Hz�ʼn���Ă鎞��duty������Ƃ��B
�Z���T�[�t���ăt�B�[�h�o�b�N���Ȃ��ƃ_�������ˁB >>96
DC ���[�^�[����ˁHPWM �ɂȂ��ĂȂ���Ȃ����H
��]���x�����ǁA�p���t���i��g���N�j�ɂ��邽�߂ɂ́A
���[�^�[�ɂ�����d����Ⴍ�A���[�^�[�ɗ����d����傫������B
�I�[�v�����[�v�ł͕��וϓ��Ɏア�̂ŁA���[�^�[�̉�]����
��d����������d���A���v�Ƀt�B�[�h�o�b�N����̂����z�I�B �R�C�����܂��Ă���
�ǂ�����Ē�d���ő�d���������H
�o�J�Ȃ̂��H >>98
���ɗ��\�Ȑ���
T-N�AT-I�������j�]�����
���炷��ƃ��[�^��T-N�J�[�u�����������Ă邩�A�R�M���O���ł��߂���낤��
�N�������Ă���duty���Ƃ��Ő������Ǝv������
�ʖڂȂ猸���@���܂�
�_�C���N�g���Y��ɉ����Ȃ�G���R�[�_�g���ăt�B�[�h�o�b�N�����Ȃ��ƌ��������� >>99
���[�^�[�̃R�C���͏����Ȓ�R�ł͂Ȃ��R���f���T�[�̂悤�ȓ�����҂��Ă���B
�~�܂��Ă���܂��͕��ׂ��d����Ԃő�d���𗬂��Ă��Ƌ����g���N���ł�B
�Ƃ��낪�A���[�^�[����]���n�߂Ė��C���������A�������͕��ׂ���������Ԃ�
��d��������������ƃ��[�^�[����]���͂����Ƃ����Ԃɍ�����]�ɂȂ�[�q��
�d�����㏸���Ă��܂��B�����ʼn�]����������x�㏸������A���Ȃ킿�[�q�ԓd��
���Ⴂ�Ƃ���œd����������B
���̂��Ƃ������āA�d����Ⴍ�A���[�^�[�ɗ����d����傫���Ɛ��������B
�ԂŗႦ��Ȃ�A�����R�O�L���܂ł̓K�b�c���A�N�Z���ݍ��݁A�X�s�[�h���[�^�[
���R�O�L���ɂȂ�����A�N�Z�����ɂ߂�Ƃ����������B >>101
�����o�J����
����ᕉ�ׂ��d�����炻���Ȃ�̂ł�����
���ׂ��y�����ɁA�ǂ��̂����̂œs���悭��d���𗬂�����㕨�ł͂Ȃ�
�o�J�̋ɂ݂���
���O�X�^�[�ڑ����g���N�d�������Ă��o�J����H >>102
�g���N�萔�̈Ӗ����C�i�[�V���̈Ӗ����d�����䑝����̈Ӗ����������ĂȂ�����H
���m�͍߂Ȃ肾�� >>103
�Ȃ猸���@���܂����̂Ɠ��l�ȁA�����Ɏ��炸�g���N�A�b�v�Ɖ�]���ጸ�����H�����������
�o���Ȃ�������
�ߕ��ׂ������Ă����̃g���N���傾�A�o�J�� �R�C�����R���f���T�ƗႦ���̂͏��߂Č���w
�d����������Ƃ����\�����Ɠ�����
��Ԃ���ƁA�d������Ŏw�ߒl��������Ƃ����Ӗ����Ǝv��
���x���オ���Ă���Ƃ��̎w�ߒl�͂��̂܂܂ł��A���ꂱ���t�N�d���̂����Ŏ��ۂɗ���Ă�d���͉������Ă��邩��\������������
����Ă邱�Ƃ͑��x���オ������duty��������Ƃ������Ƃ��� >>101
�ʔ����\���ł��ˁB
���ŏ�������������₷�����ȁB
�P�C�d���d�����d��✖️��R➕���[�^�[���d�d��
�Q�C���[�^�[���d�d������]��✖️�t�N�d�͒萔
�R�C�g���N���d��✖️�g���N�萔
�t�N�d�͒萔 �� �g���N�萔
����Ȃ����t�̓O�O���Ăˁ`�B >>106
������I
�����������炯���B ���ʂ̂�������pDC���[�^�[���������͎̂���̋ƁB
�����@�K�{ ���2p3s������
�X�L���[�����ĂȂ���
�t���C�z�C�[��������}�V�ɂȂ邩���m��N���ł��Ȃ��Ȃ邩���ˁ[ >>106
�搶�I
���̃}�N���ɂ͂ǂ�Ȑ�����̂ł��傤���H �Ƃ��Ƃƒ�i�ȉ��̓d��������
��i�ȏ�̑�d�������Ă������DC���[�^�[��̓I�ȉ�H�o��>>98 >>110
�P�C�d���d�����d���~��R+���[�^�[���d�d��
�Q�C���[�^�[���d�d������]���~�t�N�d�͒萔
�R�C�g���N���d���~�g���N�萔
���x�͑��v���ȁ` ��ʂɃ��[�^�[�̃p���t���Ƃ́A���וϓ��ɓ����Ȃ����z�`�ɋ߂����Ƃ����A
��]���̃g���N�͐Î~�g���N�����Ȃ��̂ŁA�����\�͗v�m�F�B
�K�v��]���ɑ��A��i��]���ɗ]�T������g���N�̕s���͌����M���ʼn҂��B >>98
�d������Ȃ犪���d�����t�B�[�h�o�b�N�����Ȃ��H��]���͍s���ė��������ǁB
���Ɖ����r�������̂������ɂȂ��ĂȂ��B���x�𐧌䂵�����̂��A�d���𐧌䂵�����̂��A�}�C�i�[���[�v�ɓd������������������x����Ȃ̂��Ӗ��s�B���{�ꂪ�s���R�Ȃ̂��ˁB
�A���v���ċL�q���݂�ƁA�ẪA�i���O�T�[�{���v���o���� >>105
>�R�C�����R���f���T�ƗႦ���̂͏��߂Č���w
�R�C�����R���f���T�ƗႦ���̂ł͂Ȃ��A�c�b���[�^�[���R���f���T�ƗႦ���B
���[�^�[����~���Ă����Ԃ̓R���f���T�����d����Ă����Ԃ̂悤��
�d���i��d���j���������Ƒ傫�ȓd���������B���[�^�[�̉�]�����㏸
����ɂ�R���f���T�ɓd�ׂ����܂��Ă����悤�ɗ����d���������Ă���B
�܂�d���̕ω��̓R���f���T�ɓd������������ꍇ�Ɏ��Ă���B
���_�����ȃR���f���T�ł͂Ȃ��A�����R�������R�����݂���R���f���T�B
�����R�͓d�@�q��R�ŁA�����R�͓����C���B�R�C���̂k�����傢�Ƃ���
���ǂˁB
> ���x���オ������duty��������Ƃ������Ƃ���
���̒ʂ�Bduty ��������Ƃ������Ƃ́A����d������т������͓d����������
�̂Ɠ������ƁB��̎Ԃ̗�Ō����Α��x���オ������A�N�Z�����ɂ߂�Ƃ�
�����ƁB��������p���t���ȋ}�����ŁA�ō����x�͂������ő����B >>115
���o�Ƃ��Ă͉�����ǁB
�R���f���T���ƁA115�̂Ƃ������d���Ɨ��܂����d���̍��œd��������邩��A���܂�قǓd���͌���B
�����ǁA���[�^�[�͉�]���オ��قǔ��d����d���������Ȃ�A���̍��œd��������邩��d���͌���B
�ǂ����ł������̂��ȁ`�B >>116
�u���[�L�Ȃ��C�i�[�V���ɒ~����ꂽ�G�l���M�[��d���Ƃ��Ď��o���̂�
�R���f���T�Ɏ��Ă�Ǝv�����ǁA�o�����Ƃ��Ď��Ă�Ƃ����l�����������A�Ƃ���
���x�ŁA���܂�[���l���Ȃ������ǂ���������Ȃ��B ������Ȃ��b�ł��炵�ĂȂ���
DC���[�^�[�W�Ȃ�������荂�g���N�ʼn��@�������� ��������DC���[�^�[�Ȃ�A�J�Z�b�g�f�b�L���甲������B
���וϓ��������Ă���]�������ɕۂ��Ă���邼�B >>117
���[�^�[�͓d�C�n�Ƌ@�B�n�̑��ݕϊ��킾����A�R���f���T��Ⴆ�Ƃ����ŏ�����@�B�G�l���M�[(��]�G�l���M�[)�ɒ~������Č���������������Ȃ����ȁB >>119
����͂ǂ��炩�Ƃ�����PLL���䂪�̂���Ȃ������������H ���W�J�Z�͓̂d�����ɂ���t�B�[�h�o�b�N���������Ă����Ȃ�
PLL�͒������@��������� �d���W�Ȃ��ɓd�����䂪�ł���A���v������ǂ�ȂɊ��������Ƃ� ������d������Ƃ���
�������d���̍Œ�ō��̕��͂��� DC���[�^�[�ɋ����I�ɑ�d�������Z�܂��[�H ����̂ǂ���
�u���[�^�[�̒�i�d���ȉ��̓d���ŁA��i�ȏ�̑�d���𗬂���v��H�Ȃ́H >>122
���W�J�Z�̃s���`���[����]�����
���[�^���Ɏ��t�����ړ_���̃K�o�i�ň���]���Ă���
���Ȃ�z�[���f�q�Ȃǂœǂ�Ő��䂷��������オ�肾�낤 �J�Z�b�g�f�b�L�쓮�p���[�^�[�̉�]����������̗��j�Ƃ����E�E�E
�X�y�[�X�̐���������āA�����̃��R�[�h�Ճ^�[���e�[�u���Ń|�s�����[�������U�����[�^�[�ɂ��
���p�d���̎��g�����������͕��y�����A�d�|�����{����DC���[�^�[���X�^���_�[�h�ɂȂ����B
�@�B���K�o�i �� �d�q�K�o�i �� �d�q�T�[�{�iFG�T�[�{ �� PLL�T�[�{�j�Ɛi���B�ŏI�I�ɂ�
�������U�q�ɂ�鎞�v���݂̐��x����������Ɏ��������A����͏㋉�@�݂̂̓����������B >>131
�U�����[�^�Ŏ��g�������ł�����ł��� �����̎��v�Ɠ����œ������[�^�ł���B >>127
���ł��������̂��Ĉ�ʌ`�Ŏ��p�I�łȂ��̂���
�d��������ď����Ă�̂Ɍ��o�����G�ȍ�� ���w���̂Ƃ��ǂ}�ӂ�
���R�[�h�v���[���Ɏg�p�����ƏЉ��Ă���
�N�}�h�����[�^�[
�u�����A�N�}�����o!?�v
�q�X�e���V�X���[�^�[
�u�{����ۂ��̂�!?�v
���̑��ɂ�
�Z���V�����[�^�[
�u�����Ȃ�̂��Ƃ��...�v
�����Ă���ȃC���[�W�̂܂܍��Ɏ���
�����ȒP�ɒ��ׂ��邾�낤����
���̈�������C���[�W������Ă��܂��悤��
���ׂ邱�Ƃ��ł��Ȃ� >>134
���삶��Ȃ��������ړI������ �����I�Ȏ���Ȃ�ł����u���V���X���[�^�[�̒��S���̃��[�^�͉i�v���ł͖����d�C���ɂȂ�\���͖�����ł��傤���H �u���V���X���[�^�Ƃ������ƂȂ�A�O���Ƀ}�O�l�b�g�A�����ɓd���ō\�������A�E�^�[���[�^�[������
�C�i�[�V����傫������ꍇ�Ɏg��
�t�@�����[�^�Ƃ� ��鑤������
�����łȂ���u���V���X�̈Ӗ����Ȃ� �ŋ߂��Ɩ��ړ_�[�d�Ƃ����o�Ă��Ă܂���
�u���V���X�A�����X�̃��[�^�[������\�ȋC�����܂���
�����Ȃ̂ł��傤���H �i�v�����g��Ȃ��Ȃ�d�����{�ɂȂ��
�d�C��́H ���Ύg�������G�l���M�[�����グ�₷��
���j�I�ɂ͓d���̑���Ɏ����̗p����悤�ɂȂ�����
�M�Ƌt���E�Ƌ@�B�I�ɂ͎キ�Ȃ������ǂ�
�u���V���Ȃ��Ƃ������ƂŃu���V���X���L�`�ɑ�����ƗU���@��SR�͎��Ύg��Ȃ��� �ӊO�Ɠ�����Ȃ�ł���
����ł͐^���R�C�����̊O��������
�X�ɊO�����R�C���̗l�ȃ��[�^�[���ėL�����肵�܂����H �C���[�W�Ƃ��Ă̓u���V���X���[�^�[�̒��Ƀ��[�^�[�������Ă���l�ȃC���[�W�ł� �F���ρi�������6�j�̍���
�F���ρu���傪�������炢�ł����ɃT�����������ɗ��₪���!!�@����Ȗ�Y�͉��l���Ԃ��̂߂��Ă�邺��!!
�܋�����邩�炢�ł��������ė�����!!�@�҂��Ă邺��!!�v (�����)
�� �n���S�T��������
�@�@�@�@�@�I�E���^�����͓����u�T�����v����邱�Ƃ͂ł��Ȃ������B
�@�@�@�@�@���m�Ɍ����@�u���ݔ��v�������Ă��Ȃ������B
�@�@�@�@�@�_���F���̐ݔ��ō��@�S������ł���B�u�K���N�^�Ȑݔ��v�ł���B
�@�@�@�@�@�_���F�̐ݔ���{�������̂��u�x�����v�ł��邪�@�������Ɓu��̓P���v���Ă���B
�@�@�@�@�@�T�����͓V�c���͂���^����ꂽ�B
�@�@�@�@�@���m�Ɍ����@�I�E���^�����ɐ��������H������@�u�T�����v���I�E���ɗ^�����B
�@�@�@�@�@�I�E���^�����ɂ́@�����̑n���w��M�҂ƌ����x�@�����荞��ł����B
�@�@�@�@�@�n���S�T�����������N�����@�I�E���ւ̋����{�����u�x���v�Ƃ�����������u�n���S�T���������v��U�������̂�
�@�@�@�@�@�V�c�����x�@�Ƒn���w��ł���B
�@�@�@�@�@�V�c�́@���̑̎���@�傫�ȁu�����v��~���Ă���B
�@�@�@�@�@�I�E���Ȋw�Ȃ̃g�b�v�́@���{���ŎE���ꂽ�u����v�Ƃ����l�����B
�@�@�@�@�@����́u�T�����v����̌o�܂�m��l���Ȃ̂Ł@�u���{���v�ŎE���ꂽ�B
�@�@�@�@�@ http://d.hatena.ne.jp/kouhou999/20150224 �����������̂��͂킩��ǁA�c�C�����[�^�[�^���[�^�[���Ă̂�����
�p�e���g�o�Ă��Ǝv��
�A�E�^�[���[�^�A�C���i�[���[�^�A���ꂼ��ɑΌ�����ƃX�e�[�^�̍\��
�������ʓ|���������ǁA�̐ς�����̏o�͂͑傫���Ȃ� >>146
�d�r�͐F�X�i����V�Z�p�������I�ɐF�X�L���Ė��邢����������
���[�^�[�̐i���͐��\�N�O���瓪�ł��Ŗڗ������V�Z�p�������ȁ[��
�����o���鎖���L��Ȃ�͍����Ă݂悤���ȓ��Ɓc �ڗ������V�Z�p�Ŗڗ����[�g�� �i���������킯�ł��Ȃ����ǂ�
IPM���[�^�Ȃ��ǂ��Ⴉ��
�t���p���[���o�����߂̃x�N�g�����䗝�_��70�N�ォ�炠�������ǁA�h���C�u�Z�p���ǂ����Ȃ�����
�����̂̐i���ɂ���č��ł̓}�C�R�����x���ʼn�悤�ɂȂ�������AIPM���[�^�̌����A�b�v��_���č\�������ǂ���Ă�
���ł��������ȁA����@�ɉώ��̓��[�^�̗p���Đ���ƒE����T-N�������̂��̂�ς��Ă��܂��Ƃ�
�ǂ�����h���C�u�������Ẵ��[�^�Ȃ̂ŃV�X�e���S�̂Ői�������Ȃ��Ƃ����Ȃ����� >>147
���[�^�[�������̂̂悤�Ɏʐ^���ŋZ�p�ō���悤�ɂȂ����甚���I�ɐi�����邩���ȁB �Ⴆ���[�^�[��d���Ƃ����
�C���o�[�^�[���g�p�������[�^�[�͌u����
���܂ł̗��j����@����ɂ������łɃ��[�^�[��E�p��
�d���̑����LED�̗l�Ƀ��[�^�[�̑���ɂȂ�l�ȃ��m��͍����Ă����]�����ɓ����Ă�Ǝv��
���́A�d���A�͂̎d�g�݂�����l�Ȏ��͂ł͖������Ȃ��d���ŗ͂��鉽��
�������ꂪ�����藝�_���H�����̂͌���ł͂܂��܂��悾�Ǝv���̂�
����̗����ōl������F�X�ȕ��@���ǂ�ǂ��Ă����ׂ����Ǝv��
�ȂǂƏ����M������Ă݂� �܂����������ȗႦ�b��
�����g���[�^�[�Ƃ��m���̂� �ŋ߂̓����ɂ��Ă������a����ł���
�����g���[�^�[���č�����]������̖��A���M�̖��Ȃlj���������ł��������H
�C���[�W�I�ɂ̓A�N�`���G�[�^�̗l�ȃC���[�W�������̂ł��܂�C�ɂ��Ă��܂���ł���
��L�̚g���ł����ƒ����g���[�^�[�̓��[�U�[�Ɏ��Ă���̂��� 151�������������Ƃ��悭�킩���
�����E��������O�̂悤�ɂ���Ă��邱�Ƃ��� �����̃T�[�{���[�^�[�����Ď������Ă����ǁA�ŋ߃T�[�{�̒��q�������ē����Ȃ�
����ꂽ�̂��Ǝv������A�Ȃ̔��q�ɓˑR�������肷��
����Ȃ�Ȃ�
��ꂽ�̂��ǂ����`�F�b�N�ǂ����������
�}�C�N���T�[�{�X���@�r�f�|�X�O
http://akizukidenshi.com/catalog/g/gM-08761/ �[�q�Ԃ��V���[�g���ĂȂ��Ȃ�o���������Ȃ������ �����Ԃ̃X�e�A�����O�𐧌䂷�郂�[�^�[���Ĉ�ʓI�ɂ͂ǂ����������[�^�[�ł��傤���H
�ʒu�����߂�̂ŃX�e�b�s���O���[�^�[���T�[�{���[�^�[�ł����̂��Ǝv������
�u���V���X���[�^�[�ł̗�����ĈӊO�Ɏv�����̂� �u���V���X�̃T�[�{���[�^����Ȃ��̂� �����A�u���V���X�ł͂Ȃ��A�܂��̓��]���o���t���ĂȂ��Ȃ�A���̎����Ԃɂ͐�ɏ�肽���Ȃ� DC���[�^�h���C�o��IN1,IN2�̑g�ݍ��킹���䂷��̂������̂���
CW/CCW,PWM(,BREAK)�ő�d��������z�����ȁH10A�Ƃ�20A
�}�C�R����PMW���g������_����H�����܂������Ő��䂵�����̂���
���łƂ����d���̂͗L�����
FET��ʓr�p�ӂ���̂ł��ǂ��̂���
FET��ʂɂ���̂̓u���V���X�ł͂���悤�Ȃ��� �C���o�[�^�[���݂Ȃ�5Amax���炢�܂ł���Ȃ����ȁ[
�����ău���V���[�^����
�n�C�T�C�h�h���C�o�p�ӂ���̂��ʓ|�Ȃ�Infineon�̒ሳ�pIPM�g���Αg�߂�Ǝv�����njl�Ŕ����ƍ�����Ȃ��H ���x�Ȑ��������ꍇ�A�܂��o�͂��傫�����̂قǃu���V���[�^�[�������̂����̏�B
�u���V�̐ڐG�͕s����ŁA����̌��ƂȂ�l�����U���邩��B �Q�[�g�h���C�o�Ƃ������̂炵��DRV8701�����������Ȃ���
����ܓ��萫���ǂ��Ȃ��Ă�����ƃn���_���ɂ����z�Ȃ��
���ɂ��Ȃ����ȁ[�� ���������̂��炠��H�u���b�W�h���C�o�Ȃ�Allegro�Ƃ��ɂ��������͂�
���̎�̃h���C�o�͊�{�u�[�g�X�g���b�v�^������A�n�C�T�C�h�̃x�^ON���Ԃɒ��ӂ�� �����Ă���������[�J�[�ł��T���Ă݂�@�ǂ������� >>159
�T�[�{���[�^�[�A�o�����Ă݂����ǁA����킩��܂���
�����q���g���������� �ȒP�ɓ���\�Ȃ̂�30V25A����
����������g���ɂ��둼�̕��@�ɂ��됶���ȕ��@����僄�P�h�����
���{�b�g�ł��������́H >>170
���[�^���ɂł���Ȃ��i�d����50%���x��ʓd���Ă� ��i�d����50%�ł�
��d�������Α�g���N����������Ă����n����������
�ǂ�����đ�d��������������悗 �����ƊO����͂ł������āA���[�^�[�̎����t��]������낤��
�u�ف`��A50%�̓d���ł�����Ȃɑ�d��������邺�����ЂЂ��v�݂����ȁE�E�E 173�͉�]�̂̓��͊w���������ĂȂ��Ȃ��� >>175
��������
�O�͗��݂ł����Ȃ��Ă���Ă̂ɁA�O�͂Ȃ��ł������Ȃ�Ǝv������ł邩�炽�������� �o�J����
���Ȃ��Ƃ�>>71��>>99�̃R�����g���烂�[�^�𗝉����ĂȂ��z���Œ�ł���l���邱�Ƃ��킩�� �o�J��>>179����
200V���[�^�[��100V�d���Ŏg����
��d���ō��g���N�Ŏg����Ƃł��H �����Ȃ�}�ɘb����Ǝv���A�d
�܂�>>71=>>91=>>173�H�H
>>173�͂��̒ʂ肾����>>71��>>91�͓d�C��H�����Ƃ�蒼���� �𗬃��[�^���Ă�
�d�C��H�̗͗��킩���ĂȂ���
�����̊�{�@���ł���G�l���M�[�ۑ������痝���ł��Ȃ���ˁB ���[�^��������āA�قƂ�ǂ̐l�����[�^�̃G�l���M�[�ۑ����𐔎��ŏ����Ȃ���B�m���Ă��H �����������m�Ɍ�����
>>173�̑O���͍����Ă邯�nj㔼�͍����ĂȂ�
�g���N�o�Ȃ����Ǒ�d���̓��[�^�ɗ����Ȃ��͂Ȃ��� �o�J���A����
���[�^�[�Ȃ�Ȃ�ł�����ł���o�͓������Ǝv���Ă�̂��H��
200V���[�^�[��100V�d���Ŏg���Γ��o�͂��o�āA200V����荂�g���N�ɂȂ�ƁH
���� ��Șb��ǂ����甭�����Ă���̂��B
�܂��A185�������ł��Ȃ��̂ł����
�d�C�̊�{���킩���ĂȂ��Ƃ������� �Ղ��Ղ��Ղ�
���̃o�J�́A�X�^�[�N���f���^�^�]�ł�
�ǂ���������o�͂��Ǝv���Ă낤��
�ق�ƁA�Ԕ�����
�Ȃɂ��G�l���M�[�ۑ������悗
���ʂƂ���]�Ƃ����ɂȂ��̂��H �����߂�ǂ���������
���[�^�̊�{�ƂȂ�G�l���M�[�ۑ��������Ă݂��
�����Ȃ������痝�����ĂȂ��ƔF�����邩�� �ǂ����ėp�C���o�[�^�ł������[�^�����ƂȂ��낤�� �Ղ��Ղ��Ղ�
�X�^�[�f���^�n���@
�n�����ɓd���@�̈ꎟ�������X�^�[�����Ƃ��ē������A��莞�Ԍo�ߌ�Ƀf���^�����Ƃ���B5.5kW�ȏ�̓d���@�Ōy���ׂ܂��͖����n���̂��́B���邢�͑����@�Ȃǂ̋�-���ւ��ɂ��g����B�����́A
�O�t���̎n�����u���s�v�ł���A���d���n���@�̒��ł͈�Ԉ����ł���B
�n���d�����S�d���n���@��3����1�ƂȂ�B
�n���g���N����i��3����1�Ə������B >>185
�ǂ��������ƁH
��i�d����50%�̓d�������āA��i�N���d���ȏ�ɓd���𗬂����@������́H DC���[�^�ł���Ȃ��Ɖ\�Ȃ�
�N�����͏���R�Ƃ݂Ȃ���Ǝv���Ă�������ȏ㗬�����Đ����� �Ă��ȒP�ɂ�
���ʂ̒P��/3���𗬃��[�^��2���Ԃɂ����̒����d�����Ă݂Ă�B
���X�ɏグ�Ă����d�������邩��B
�V���t�g�͉��ǂˁB
��d���Ń��[�^����������PWM�R���o�[�^��������A�t�B�[�h�t�H�A�[�h�œd�����͂ł��邵�B
����Ƃ��͔����d���ɉ����ė͗�������ɒ�������邵�B ����HDC���[�^�̘b�͂ǂ�����H �d���𗬂����@�͓d���������邵���Ȃ�
���w���Ȃ琳��
���Z���Ȃ痯�N �u���V���X���[�^�Ȃ�x�N�g������g����d���d�������Ɨ����悢 �Ƃ����>>191�͂����̒��w���������݂����� dc���[�^�ł��P�����[�^�Ƃ��ĉ悢���瓯�����Ƃ�������
�R���f���T�[����ɂ��܂����n����H���K�v�͂��邯�� >>198
���[�^������ĂȂ����i�ȏ�̓d�������邱�Ƃ͉\ 98���炢����̗��ꂾ����
���ݕt���Ă���l�ƌ��t���炸�̐l��DC���[�^�[�Œ�ʓI�łȂ���d���_�����킵�n�߂�
d���d������Ȃ���d���d�����ď��߂Č�����
�́A�s�̃o�b�e���[�V�X�e���Ń_�C�i�~�b�N�u���[�L�t����X�y�[�X����������d�������[�^��d���Ɏ̂Ă�Ƃ��������
�C���o�[�^�R�������ɂȂ����� ������Ƀ��A�N�g�����J�`�J�`�Ȃ邱�Ƃ����邩��C������ ���t���炸�Ƃ͎���ł��ˁB
���Ȃ݂ɗ͗��͂����Ɨ�������Ă܂����H �N���A���[�^�[�͒�R���Ǝv���Ă��� >>99 �ɋt�N�d�͂������Ă����Ă��� ��������[�^���䉮�Ȃ�͗����ʓd�ʑ��p���ŕ\�����邯�Ǔd�͊��̐l��w�Z�ŕ����ė����l�͗͗����Ă�����
PFC�ςꍇ�ɍ������邩�烂�[�^�ł͎g��Ȃ��悤�ɂ��Ă� �[�i�������]�����ɂ�ԕi���ꂽ
���ꂪ�͗���
�킩��₷�����A���͂��̒��x�����킩��ւǂ� >>195
���������Ӗ��ł̑�d�������邩�H���ĈӖ�����Ȃ����ǂ�
��g���N�����Ēᑬ��]�o���邩�H���Ă����Ӗ��̑�d���Ȃ��ǁH �����œd��50��������Ƃ������Ă邯�ǁA�d��������Γd���������邵�g���N��������
����Ŏn���������ăg���N�s���Ń��[�^�[���Ȃ��ēd�������ăg���N�������邯�ǁA
���̒�i�d���Ŏn�������̂Ɣ�ׂĂ��A������d���ł���g���N�ł��Ȃ蓾�Ȃ����ǁH >>93�ɑ���
�E�����@�g��
�E����
�̂ق��ɂ́A������ׂďo��������Ă�l�������A���܂��ɖ��m�ȉo���ĂȂ���� �ᑬ�o��OK�B10Hz�ȉ��ɏo���Ȃ��́H �O�͂ɗ��炸�A�ǂ�����č��g���N���]�������ł���́H
�g���N���炵�Ē��]�ɂ��ă��[�^�[���Ȃ点��H
������Ē�g���N���ʓd���Ȃ����ŁA�S�R���g���N��d������Ȃ������ǁH
�g���N���₵��������獂��]�܂ʼn�����Ⴄ�ł���H ������ĉ����������ɑ�g���N�̂܂܈ێ��ł��Ȃ��ł���H
���]�ێ����Ĉ��肵����g���N����
���ׂ������Ȃ�����g���N���d���������Ȃ�
�����@�t�����̂Ɠ��l�Ȓ�o�͓����̂��̂��ǂ��� �t�B�[�h�t�H���[�h�Ő�������ƁH �t�B�[�h�o�b�N���䂵�Ă�Ȃ�
�g���N�̎w�ߒl(�d���w��)�Ɠd���̃t�B�[�h�o�b�N�l����v������ǂ��撣���Ă��d����������킯�Ȃ�
�t�B�[�h�t�H���[�h�ʼnĂ�A�܂�A�d�������ʼnĂ�Ȃ�A���g�������邵���Ȃ��B����œd���グ�ăg���N�o�Ȃ��Ȃ�E�����Ă�Ƃ����B >>219�̖]��ł��Ԃ��ĕ����@�������Ă�悤�ɂ��������Ȃ� ���₢��
������݂�Ȗ��������Ă�ł���A���ꂩ�����@�g������Č����Ă邶���
��l�����o����o������������A�����@������
�o����Ȃ��̓I�Ȏ������@������ ���炵�܂���
�����̃A�X�y�ł��� ���ׂ��y���Ă����]�E��d���E��g���N�Ƃ��ƿڂ��Ȃ�
�����镉�ׂƔ����g���N�͓����ł��邱�Ƃ����Ă���B �o�J�A�Đ~�����J������ŋ�C�ǂ܂�����肢��Ă܂���
���Ȃ��Ă���܂��B >>225
�����ł���
>>219�����������ł��ˁB ID�ւ��������������ł�
�܂��A����������d�͂𑝂₷���Ƃ͂ł��Ă��A���ׂ��Ȃ��Ƒ�g���N�͂ނ肾��
���̂����������̏u���g���N�͑�g���N�Ƃ�����������������
���[���ۂ��A>>98�̐��������̒ʂ�ǂނƊm���ɐԓ_�����ǂ��̌�̕⑫�Ɖ����X�̕⑫�Ō����������Ƃ͂킩����
���̎�̐l���烁�[�������Ă�����ƍ��� �d���͗������̂ł����āA���݂ɗ�������̂ł͂Ȃ�
�����͏o���邯�ǂ� ���₢��𗬂������炻�ꐬ�藧���Ȃ����ǂ� ���[�^�[�Ɣ��d�@���\����̂��Ă��Ƃ�Y��Ă�l������ ���[�^�[�͊O���痬�����d���ʼn�]���A�����ɔ��d���ĊO�t�����̓d���𗬂��Ă���B BGM�́A�l�c�Ȍ�́u�ǂɌ������āv >>219
�c�b���[�^�[�̔�������g���N��
�g���N���g���N�萔�~�d�@�q�d��
�ł���B
�g���N�𑝂₷�ɂ́A�g���N�萔���A�b�v����
���d�@�q�d���𑝂₷�̂Q���B
�g���N�萔�𑝂₷�ɂ͈�ʓI�ɂ͊E��������
����Ƃ��ɐ��𑝂₷�Ƃ��B���ヂ�[�^�[�ł�
�Ȃ���ΈႤ���[�^�[���g���Ƃ����Ӗ��ɂȂ�B
>>219 �������Ă��錸���@�͋@�B�n�Ƃ��ăg��
�N���A�b�v������@�ŁA�����@���݂Ń��[�^�[
�ƍl����A�g���N�萔���A�b�v�����̂Ɠ���
�ł͂��邪�A����̓e�R���g���Ęr���o���āA
�ǂ������A�͂����邾�낤�Ƃ����Ă�悤�Șb
�ŁA���[�^�[���̂��������Ă���g���N���A�b
�v���Ă���킯�ł͂Ȃ��B
�������[�^�[�A���Ȃ킿�����g���N�萔�̃��[
�^�[�Ńg���N���グ��ɂ͓d�@�q�d���𑝂₷
�����Ȃ��B
�Ƃ���ŁA���[�^�[�̏o���g���N�Ƃ����̂́A
�����^���Ō����Η͂ɑ������A�����x�ł���B
���ׂ������ď��߂ĈӖ��̂���g���N�ł���B
�قږ����ׂŒ�d�������g���đ�d���𗬂��ƁA
���[�^�[����������g���N�Ɍ��������ׂ��Ȃ�
�̂Ń��[�^�[�̉�]���͈�u�ɂ��č�����]��
�Ȃ�B���肪���Ȃ��̂ɗ͂����ς��r���o����
��悤�Ȃ��̂ł���B���[�^�[�̘b�ɖ߂�ƁA
�d�@�q�d������u�ɏ㏸����̂ŁA�������d
�����Ƃ����ǂ������̓d���͋����ł����A��d
�����������\�ȓd���Ńo�����X����B
���[�^�[�ɏd���͂��ݎԂ̂悤�Ȋ������ׂ���
���Ă���ꍇ�A���[�^�[���傫�ȃg���N���o��
�Ă��A��]������u�ɏ㏸���邱�ƂȂ��A���X
�ɏ��X�ɉ�]�����オ���Ă����B��]�����ǂ�
���x�̃y�[�X�ŏオ���Ă������Ȃ̂Ńg���N��
�����x�ł��邱�Ƃ������ł���Ǝv���B
��~���Ă���d���͂��ݎԂ������ɑ��������
��]���܂ʼn邩�A����͂��Ȃ킿�A������
�����g���N���o�����Ƃ������ƂŁA�d�@�q�d��
�𑽂������ׂ��B�����������ƂɂȂ�B
���Ȃ݂ɁA�͂��ݎԂɃg���N������������ƁA
��]���͂ǂ�ǂ�㏸�𑱂��Ă��܂��̂ŁA��
�]���A���Ղɂ͓d�@�q�d��������̂Ƃ���܂�
�㏸������d�@�q�d�������点������]�ɂ�
����Ȃ����邱�Ƃ��ł���B ���������Ă����e���Ȃ��i������O�̂��Ƃ�����j
�d��50���Œ�i�d�����ȏ�̍��g���N��
�o������̂Ȃ�Ƃ��ƂƏo���� �����X�e�b�s���O���[�^�ɂ���Ⴂ������� ������Ƃ��������l�Ȃ�N�ł��m���Ă�悤�Ȃ��Ƃ�
�������ʂȂ��Ƃ̂悤�Ɍ������炱��Ȃ��ƂɂȂ�� �y�b�p�[�N��菭�������ȃ��{�b�g��
��肽����ł���
12v 60w����120w���x�Ōl���w���ł���
���[�J�[�������ė~�����ł��B
�ł���Γ����Ȑ��������郂�[�^�[��
���ꂵ���ł��B
�}�N�\���͍�����
���݂₩�}�u�`�͗~�����̂�������
�����Ă܂��B �ԗp�͎̂Ԃ̕��i���炵�Ď��o�������Ȃ�
���C�p�[���[�^�A�E�C���h�E�E�H�b�V���|���v�Ƃ��A�p���[�E�C���h�E�A�h�A�~���[ DC���[�^(�u���V�L)��AC���[�^(�u���V���X)�ŃX�����Ăق����ȁB
���낢�낲������ɂȂ肪�� ������Ƃ�����
�@�����E�������[�^�[
�@�U�����[�^�[
�@�u���V���X�E���[�^�[
����ˁH �C���o�[�^�[�̃I�[�g�`���[�j���O���Ăǂ����������Ń��[�^�[�萔�����߂Ă��ł����H
���[�J�[�̃t�B�[���h�G���W�j�A�̂��������Ɂu��Ɣ閧����ww]�Ƃ������ċC�ɂȂ��Ƃ��ł��B �������m�E�n�E�������
�������Ă݂��牽���킩�邩�� �܂����͓���̎��g���̓d������͂��āA���[�^����Ԃ��Ă���d���o�͂���A�C���s�[�_���X�v�Z�ł����A�t�N�d���萔���C���_�N�^���X������ł���B >>243
�U���@�Ɠ����@�͕������琄��ł���
�����邱�Ƃɔ��͂��Ȃ�����
�����A��Ă������R�Ƃ��āA�u���V�L���ł́A�t�N�d���萔�̑�����������ɂ���ĈقȂ�B
�w��I�ɂ͋t�N�d���萔���g���N�萔�����ǁAESC�Ƃ��ă��[�^���g�p����l�͋t�N�d���萔��1/�g���N�萔�̃C���[�W�Ȃ�ȁB
ESC�̎�����Ē萔�̒P�ʂ��t�Ȃ̂ɋC�Â����B >>239
�����DC���[�^���x�[�X�ɂ��̎�̃��{�b�g���������Ƃ�
��b����̐���ł���
�����N��������p�\�R���̂悤
�܂����A�N�����N�ŕ��s���郍�{�b�g�ł���
����Ȃ狹����2�C�����炢�̃s�X�g����������
�M�~�b�N���]���Ŏ�����Ăق����ł�
➑̂̓u���L�� DC���[�^����̑I��Ńy�b�p�[���x�̃n�[�h�����̂�
�����PC���̂Ɠ�����Փx�Ƃ��A�z�Ȃ̂�
�����g�͎ԗ쓮�ŏ㔼�g�͐g�U���U�肾���Ŏd�����ł���킯����Ȃ��̂� �y�ϓI�Ƃ����͍̂K���ł������� ��s�҂��Ăǂ�Ȃ��������B
 �n�[�h�I�ɂ̓y�b�p�[�͂�������ƕς����
�n�[�h�I�ɂ̓y�b�p�[�͂�������ƕς����
�����Ƃ��������ʂɐ��x�ǂ�������킯�ł����ł��Ȃ�
�q�p���_�����ł��Ȃ����R���l����
�㔼�g�͂����̏���
���ۂɂ���Ă邱�Ƃ̓J�����ƃm�[�g�p�\�R���ƃ����o������ł��� �y�b�p�[���āA�������K�^�K�^��������
���̃��x���ł����Ƒ��Ђ��o���Ȃ��̂͂Ȃ��ł����ˁ[
�p���_���x���ł��ʔ����Ⴂ���̂� �����ɂȂ���
���͂⒍�ڂ�����ĂȂ���
�ߋ�Ƃ܂ł͌���� ����ȒN�ł��o������̂��
���炭��d�|���̂��̂̕����� �u���V���X���[�^��T-I�J�[�u�̓d�����Ċ����̃s�[�N�d���ƍl��������́H
�����l����Ȃ���ˁH ��i�d�����̃h���C�o���͓d������ˁ[�́H
�h���C�o�̑g�ݍ��킹�œ���������邯�ǁB �P�����[�^�[���I�o�z�o������n�����ɉ��S�̓X�C�b�`�̂���ӂ肩��Ήԏo�邯�ǖ�肠��܂�����
�R���Z���g�����ĉ��o�������ɉΉԏo�Č�͐���ɉ��܂�
�I�o�z�o���O�ɏo�Ă��̂��͕�����Ȃ��ł�
�O�̂��߃J�o�[�O���ĉ��S�̓X�C�b�`�̒[�q�����X���Ŗ����Đړ_�܂����Ă�������Ήԏo�܂�
���ׂ�Ɛړ_�J���ɉΉԏo��^�C�v������Ƃ̂��Ƃł����ΉԂ����ɋC�ɂȂ� >>262
�v���p���K�X�������ɘR��ď[�����Ă��肷��ƁA���̉ΉԂň��Δ�������
�\�������邩��A���Ȃ��Ƃ����������ϓ_�Ŗ��ɂȂ邱�Ƃ͂���ȁB �^�~���̃M���[�h���[�^�[�͂Ȃ�ł���Ȃɍ�����
���C�łR��~�Ƃ������� >>265
�䐔���o�Ȃ�����B�������[�J�[���Ȃ�����B
����1000�~�Ƃ���3���Ԃł͎���ł��Ȃ�����B Ali�Ȃ�1000�~���x�Ŏ����悤�Ȃ̔����Ă邵
�^�~�����g�������b�g�͓��萫���炢�ł��� >>268
����[�AAliExpress�Ȃ�Ē����̂�ł���
�悭�g���� �Ȃɂ����܂���B�@���Ȃʔ̔�����̔�����Ali �ʒu����̎w�ߒl���Ăǂ�����č��́H
�A���I�ɓ������x�ʼn�]���������ꍇ�͑��x���犄���������̗��z�ʒu���t�Z���āA�G���S�[�_�J�E���g�l���w�肷��̂��ˁH
FF���ő��x�����O�ɓ���Ă����݂����Ȃ̂��������� >>271
���[���ƃC���N������̂� >>271
ENCref:�w�ߒl
ENC:�����l
�Ƃ�����
ENCref=ENCref+����������ENC�ʒu�܂ł̍����@���ăC���[�W�ł����Ă�H
���ׂŎ��ۂ̃v�����g�������x����ENCref�͗��z�I�ɉ��Z����邽�ߕ����ǂ�ǂ������Ȃ��ǁB ������������悤�ɓ����̂��T�[�{�Ȃ��炻���������������� PID������m���̂��H
�������܂�قǐώZ�����Ń��[�^�o�͏オ���Ă����� >>269
��������̃^�~������{���Ƃ��肪������Ƃ��A�z���
�^�~���̃M�A�[�h���[�^��M������x�ʂőI�ԓz������̂���w ���M������x��
���萫�≿�i��
菓��Ҍ��� >>278
���O�������O�̃��X���ǂ�łȂ���������p���炵�� �t�B�[�h�o�b�N�g�ނɂ������Ẵ��~�b�^�ƃ��C���h�A�b�v��̘b�����
����PID�Ƃ�����ȑO�̘b���Ă�� �ǂ�ȓǂݕ������炻��������̂��H http://rio2016.5ch.net/test/read.cgi/denki/1526718218/1000
�̕��A
�u�y�ȁz�H���A��A�ᏼ�Ȃǂ����X���y�ǁz�v�̃X���͕���������
���i���������ƒ��ׂĐ������Ă���Ă��肪�Ƃ��B BLDCM��PMSM���ĉ����Ⴄ��ł����H
�ǂ�����AC���[�^�Ȃ̂ɋ�ʂ��闝�R��������܂���B >>283
�ꏏ�����A�܂���҂͓����̐����邩��T�[�{�̈Ӗ����������邩�ȁH
����悩�A�����FrictionalSlotWinding�̐������G��߂��ă����^�B
���Ђɋ����邫���Ȃ��˂��B
�ʂɉ�����肪�Ȃ����� �啪�ނł͏����ނ݂����Ȋ�������
�\���͓��������犸���ċ�ʂ���K�v������̂��䂾�������Ȓ�`���������Ƃ��Ȃ����Njt�N�d���̑�`�g�A�����g�ŕ����Ă���
�����͈ꊇ��BLDC�ƌ������ǁA���̓\�t�\����SPM�AIPM�ƌĂԂ��炻�̎���PMSM�ƌĂ�ł��邱�ƂɂȂ�
���ꊴ�Ȃ��ȁ[ >>284
BLDCM�͒E�����Ȃ��̂��ȁH
>>285
���[�^��m��Ȃ��l����uBLDCM�Ȃ璼��������C���o�[�^�Ȃ������Ȃ��́H�v���ĕ����ꂽ�B
BLDCM���𗬂œ�����PMSM�̈����Ęb�������ǁu���Ⴀ�Ȃ��DCM�Ȃ́H�v���ĕ�����Ă�����₵�Ă�B
�T�O�I�ɂ�DCM�̃X�e�[�^�ƃ��[�^���Ђ�����Ԃ�������BLDCM���Č����낤���ǁB�B �u���V���XDC���[�^�[���Ċm���ɓd��DC������
���̃A���v���������ڑ����ς��Ȃ��Ɖ���̂�
�Ȃ�DC���[�^�[���Č����̂���a������Ȃ�
�����DC�����Ȃ�AC���[�^�����ăA���v�������g����DC�d���œ������邵 >>287
DC��AC�̕�����Y�ꂽ�����A�ނ��뗝�����₷�������� �����Ȃc�b�Ƃ����ϓ_�ʼn�葱���郂�[�^�[�Ȃ�ĂȂ����� �u���V�t���̓��[�^���̂��̂�DC�d���ɑΉ�����H�v�����Ă���̂�����
DC���[�^�ƌĂԂɂӂ��킵��
�u���V���XDC�͂܂��X�e�b�s���O���[�^�̕����߂� �����܂���Amicro:bit�ŊȒP�ȃv���O������g��ŃT�[�{���[�^�����Ă݂�����ł����A
�l�b�g���̏����Q�l�ɑg��ł݂܂����������܂���B����������ł��傤���H �Ƃ������k�͂�����ł�낵���ł��傤���H �҂̓����c�O�ȃX�����Ɣ������܂����̂ŁA�⊶�ł�����U���߂đ��̃X���Ŏ��₷�邱�Ƃɂ��܂��B���肪�Ƃ��������܂����B >>291
�ςȐl���邯�ǁA�����Ő���n����Ă�l�����邩���̓I�ɕ���������Ȃ��H �y�L���[�o�đ�g�A��c�^���z�@�I�E�����g�p�}�C�N���g�A��͑�a�ɓ��ڗ\�肾�����}�O�l�g���������^
http://rosie.5ch.net/test/read.cgi/liveplus/1536114063/l50
�؍��t�B�M���A�ڋ��I�@����m���̊��̓}�C�N���g�ɂ��e���H�@�N���㋑�ۂ̈����ޔ��b���_���Ă�H ��������̃��W�R����Ԕ����܂���
���i������ƁA�E�̂ق��Ȃ����Ă����āA�ǂ������[�^�[�̏o�͂��Ⴄ�̂͂����炩
�����䂤���Ƃ͌��\�������Ȃ�ł��傤���A����Ƃ����܂��܂̕s�Ǖi�H �M�A�����E�����R����Ȃ������ȁ@�Ȃ��錴���͂��낢�날��B >>297
���x��肾���ȁA�I�[�v�����[�v�Ȃ���
10m �Ȃ��炸�Ɉ꒼���A�Ƃ��������s�v�c�B �x�N�g��������ĕ��ʐ����g�ʓd�����ǁA����ȊO�̒ʓd������́H
���[�^�p���̂܂܂�dq�ϊ�����Ȃ��āA120�x�ʓd�݂����ɂ���͈͂̒ʓd�ʑ������Ă�����̂��ȁH �����g�ʓd�͊�{�����B
pwm�ŋ[���I�ɓd������邵���ˁ[����B
�܂��A���\�`�S�����炢������pwm�R���o�[�^�Ń��[�^�Ȃ炠�蓾�邪�d >>302
�����g�ƌ����Ε��ʂ�PWM�ŃQ�[�g�@���ă��[�^�̓d���𐳌��g�ɂ����Ȃ��́H
�T�C�Y�����M���ł������j�A�쓮�Ȃ�ē���p�r�ȊO�̗p���Ȃ��Ǝv���� pwm�̃X�C�b�`���O�̓d�����͂ŁA���ʓI�Ƀ��[�^�ɗ����d���������g�ɋ߂��Ȃ�̂́A���Ƀs�b�`�ƃR�C���̃X���b�g�s�b�`����������Ă��č����g�t�B���^�̖��������Ă邩�炾��B
���̕ӂ̓��[�^�̊����W���œ��������܂�B >>303
���ɖ����X���b�g����1�ƂȂ郂�[�^�Ŏ����Ă݂ȁB
�����g���S���ጸ���ꂸ�A�d���������g�Ȃ�Đ�Ȃ�Ȃ�����B
�������g�̓d�����͂ŁA�������肻�̂܂܁A�������g�̓d�������[�^�ɗ���� �ŋ߂͖w��10p12s�A8p9s�A14p12s����
�R�M���O�����������炾�낤���� 10p12s��14p12s�͎O�{�����g���߂��� >>306
8p9s�I�Ԃ��10p9s���������߂ł� �u���V���X���[�^���ĉ��ł�����ł������g�ʓd���������ǂ����Ă��̂ł��Ȃ���ł����H
������`�g�ʓd�̃h���C�o�ʼn������S�̓I�ɉ�]������������Ă܂� ��`�ɋ߂����ēd���̖ʐ�(�C���[�W)���₵�������g���N�͏o���� >>309
���������w�����g�ʓd�x�Ƃ��͎����o���Ȃ��B
�ǂ����̊�Ƃ̑���Ǝv���܂��B ���[�^�̊�{�ł������[�^������������A�𗬂̎��g����������悢�킯�ł��B
https://youtu.be/L3yMHkOYoOo
�������g�ʓd�̂ق����悢�H
�x�N�g�����䂵�ĂȂ��Ƃ������Ƃł��傤�� >>311
���ł�ROHM�̃h���C�oIC��TI�ARenesas�̃v���b�g�t�H�[�����͑S�������g�ʓd�Ƃ���܂����A���m�ɂ͉��ƌ�����ł��傤���H ������pwm�C���o�[�^�̓d������ >>304�̌����𗝉����ĂȂ����[�^�������߂� PWM��duty�����ʑ��p�ɉ����ĕς��Đ����g��ɂ���͈�ʂɐ����g�ʓd�ƌĂԂ̂ł͂Ȃ��āA��ɋ�������v�H���[�J�[�̓���ȌĂѕ���������ł��ˁB
���肪�Ƃ��������܂����B ���[�^�ƊE�ł͌o���������Ƃɏ���ɖ��t����ꂽ���ꂪ�����ˁB
���������������ۂ��q�ϓI�ɑ��������t�Ȃ�܂���������ǁB
����������w�ł̃��[�^�������ق��̂�����ɂȂ��Ă� �������Ń��[�J�[�Ǝ��m�E�n�E����ʉ����Ȃ��ď�����
�m�E�n�E���̂͑債�����Ƃ͂Ȃ����ǂ� �����̎������͊e��ƓƎ��̂悭�킩���ɔY�܂���� ����̃I���p���[�h�Ȗ�������ɔ�ׂ���
�l�Ԃ̎��̒ቺ���悭�킩��
�����牢�B�܂ōs���ĒZ���ԂŊw���
���@�����������グ�Ă� �����Q���킵��
���ꂾ���獡�̓��{�̓_���� 8p12s�œd���g�`�������g���Ȃۂ݂�����B
���Ⴀ�d�����`�ɋ߂Â��邽�ߎO�{�����g���d�Ă݂悤
�ˌ��ʓI�ɓd���g�`���L���C�ɂȂ��B
����ɃR�M���O�g���N�A�g���N���b�v����̂��߂�10p12s�ɂ��Ă݂悤
�ˉ��̂��d���g�`����`�^�ɋ߂��Ȃ�A�O���̓d���U�����A���o�����X���A���A�g���N�̓����傫���Ȃ�
���[��A���̂ł��傤��(��) �C���o�[�^�̑��d���ւ�3�������g�d��́A���[�^���猩��Ɛ����g�d���������邱�Ƃɕς��͂Ȃ�
����́A���ԓd���g�`�̃O���t�������Ƃ킩��
�d�����p����������̂ŁA�d���d���̏���Ŏg�p�����̂ӂ�������������ꍇ�́A�����g�d��ɂ���ăt�B�[�h�o�b�N�n�ɗ]�T���ł��邩����
�R�M���O�g���N�̓��[�^���L�̂��̂ŃC���o�[�^�ʼn����͓��
�d���U���̃A���o�����X�̓t�B�[�h�o�b�N�n�̒x�ꂩ�ȁH�@�����]���ł�4�ɑ��5�ɑ̂ق������[�^���g��������
�������̓��[�^�̌̏�H�@��-�����_�d�������ԓd���̋N�d���g�`���A���o�����X�ɂȂ��ĂȂ����`�F�b�N ���ɂ́A���[�^�p�x���o�̌덷�ɂ��e������邩�ȁH
���[�^�̎����z�[���Z���T�Ō��o����\�����ƁA5�ɑ̂ق����Z���T�̋@�B�I���x�̗v�������� �ʏ�Y�����ŎO�{�����g�̓d���������ƁA�����_�ł�0�ɂȂ�Ȃ��B
sin3�Ɓ{sin3(�Ɓ{120)+sin3(��+120)
��3sin3��
�h���C�o�ł�3���̂���2���̓d���v�������ʕt���ĂȂ�����A�c��P����Iw=-Iu-Iv���狁�߂�B
�����ŁA�O�{�����g���c���1�������O�{�����g���܂ނ��ƂɂȂ�A�O���̓d�����A���o�����X����
�d�����A���o�����X����ƃg���N�̓����̌����ɂȂ� ����B������ƒ���
�d���̈ꑊ�t�B�[�h�o�b�N�ɎO�{�����g�����ƁAdq�ϊ���A�d���w�߂Ƃ̍������ɎO�{�����g��dq�̓ɂ����邱�ƂɂȂ�Adq�̓d���w�߂ɂ��O�{�����g���܂܂ꂽ�܂܂ƂȂ�B
���̌�A�O���d���w�߂ɕϊ�����Ă��O�{�����g���c�����܂܂ƂȂ�A���̂܂O���̓d���w�߂ɂ��O�{�����g���̂�A�ȉ��J��Ԃ����ƂɂȂ�B ���Ȃ݂�8p12s�͎O�{�����g��������A�قڔ������Ȃ��B�����3���̊����W����0�ƂȂ邽�߂ł���B
����ŁA10p12s�͋t�ɎO�{�����g��ጸ�ł��Ȃ����[�^�ł���B
8p12s�̂Ƃ��O�{�����g���d���܂܁A10p12s�ɕς�����O�{�����g�̏d��̉e��������Ɏ邱�ƂɂȂ�B
���Ă����b�B �Ӂ`��A�O�{�����g���ėp�ꂪ����� >>329
��O�����g�ƌ����ׂ��A�ƌ����Ă�H
����Ȍ������ۂ����ƌ��킸�ɁA�O�{�̍����g�́u�́v���ȗ����������Ɖ��߂��Ă����Ȃ�B 2���̌��o�Ŏc��1���v�Z�ł���̂͂킩�邯�ǁA�t��duty�̏ꍇ���ăV�����g�œd���Ƃ�̂͂ǂ����� >>332
����Ɏ���ŕԂ��̂͂Ȃ��ǁA�t��duty���g����ʂ��ċ�`�g�ʓd�̂��Ƃ������Ă�H
�t��duty�œd���ʑ���������Ȃ��Ȃ�A�V�����g�Œ�������d�������邾���A���Ďv�����Ⴄ >>333
�����܂���A�t��duty����Ȃ��ĉߕϒ��̈�ł��B���[�T�C�g���w��ON���Ȃ��ꍇ�ɓd������肭���͓̂�������ȂƁB
��������ꂾ�����炷���܂���B >>329
���Ǝ��i�̓d�C����1�`3��ɂ��o�Ă���悤�ȗp��ƔF�����Ă���܂����H >>334
���l�T�X�̃A�v���P�[�V�����m�[�g�̂��ꂾ��
ttps://www.renesas.com/jp/ja/doc/products/mpumcu/apn/rx/001/r01an0903ju0100_rx62t.pdf
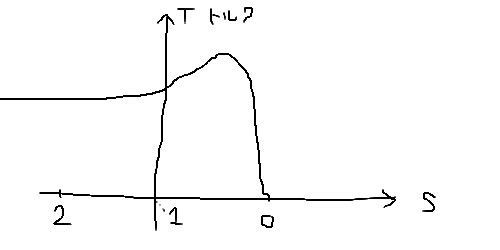
�}4�̃s���N�̐��������g�d��������ł������ŁA�������đ�`�`180����`�g�͈̔͂ʼn����A�Ƃ������Ƃ��낤
���X�͍������^�]�͈̔͂��g����͂�
�ߕϒ��ɂ��邱�Ƃƃ��[�T�C�h��ON���Ԃ��Ȃ��Ȃ邱�Ƃ͕ʁX�Ȃ̂ŁA
�V�����g�̃T���v���̂��߂̕K�v�ŒZ���Ԃ�PWM�����f�[�^�����~�b�g����A�Ƃ������@�͈ꉞ�g���� �s�̂�IPM���[�^���ĂȂ���ł��傤��
���ۂɉĂ݂����̂ł���
��͂萔�SW�Ƃ����ƃ����b�g�����Ȃ�������Ȃ��̂ł��傤�� >>338
���[�^�P�Ƃ͂��܂茩�Ȃ���
�����̐��i�̓��ʂȖڕW���\�ɍ��킹�āA���[�^�ƃC���o�[�^���Z�b�g�Őv���邾�낤����
�����N�^���X�g���N�̌��ʂ����������������Ȃ�A���̂͂ǂ����ȁH
ttp://www.yamaha-motor-elec.co.jp/products/img/motor_001.jpg
SPM�����ǁA���ΊԂɓS�R�A�̃M���b�v�������āALq��Ld�̒l���Ⴄ�͂� ��������SPM�ł������N�^���X�g���N�͏o�� >>339
�d�����]�ԗp�ł����ˁH
�R�A�̒��S�t�߂��Ă���͉̂��̂��낤
Ld�ALq�̍����������ꍇ���āA�ʑ��p���炷�ƃ}�O�l�b�g�g���N���������������U�ł��Ȃ������ȃC���[�W�Ȃ�ł����A�����ł����������Id�����Č��ʂ�������̂Ȃ�ł��傤�� �C�i�[�V�����炵�����Ƃ�����
���H�I�ɂ����Ȃ��������� >>341
�ő�g���N�d������̌��ʂȂ�A�����ł���������Ί��҂ł���
ttps://www.jeea.or.jp/course/contents/07111/
��(12)�ɂ��Aia=0�łȂ�������ALq��Ld�Ȃ�sin-1�̃J�b�R���̕��q�͐��ɂȂ� ����SPM���ă����N�^���X�g���N�������Ȃ����Č�����̂��ȁH
�܂Ƃ��ȏؖ����������Ƃ��Ȃ� �ԈႦ������
�ǂ���܂Ƃ��ȏؖ��ɂȂ��ĂȂ� Lq��Ld�𑪒肵�Ȃ��ŁA�����ڂŌ����Ă���悤�ȋC������
>>339�ŏЉ�����[�^���A>>343�ł�IPM�ɕ��ނ��Ă��邵
�m���ɁA����������Ⴆ�Ύc�������[�^�̓����N�^���X���[�^�̃��[�^�`�� �ςȎ���ł��݂܂������Ă��������B
�H��@�B�̃��[�^���T�[�}���t���l�r�Ŏn�����Ă܂����B
�{�����������Ƃ���ƘR�d�Ւf�@���쓮���Ă��܂��܂����B
���K�[�͎����Ă��Ȃ��̂ł����A���[�^���@�B������O���z�����O���āA
���ʂ̃e�X�^�[�łt�ƃ{�f�B�A�u�ƃ{�f�B�A�v�ƃ{�f�B�Ōv�������Ƃ���A���ׂ�120�I�[���O��ł����B
����̓��[�^�s�ǂŊԈႢ�Ȃ��ł���ˁH
���[�^�����ł���܂ŁA�Ƃ肠�����̉��}���u�œ��������Ƃ͉\�ł��傤���H
�X�������肢�v���܂��B 120����200V�|������400w���M�����
���U�ŔR�����Ȃ����H �Z�����Ă��
���j�X�ܐZ����Ă��犪�������Đ≏�͂����Ǝv��
�����A���̂� ���ɃR�C���̊������������^���[�^�ł͌����ɍ����o�܂��B >384
�e�X�^�[�͒����Œ�R�l�𑪂��Ă��ł���H
���[�^�[��200V�ł̏���d�͂́A�킩��Ȃ���ˁH >>352
�R�C���̊������ŕς��H�@���ł���ȁH
Ld�ALq�̓d���ˑ����͑��肵�����Ƃ��邯�ǁA�Ƃ���ƘR�k�����̉e���ł��o�Ă�̂��ȁH ���Γ����Ǝ��C��H�I��d��q���̎��C��R�������B
����͎��ۂɎ��C��H�����Ƃ����Ȃ�B����ɃR�C�������Ƃ�荷���傫���Ȃ�B
�Q�l���̎��C��H�@�ł͎��ƃR�C�����ꂽ���ƂɁAN�ɂ�S�ɂ��Ώ̂Ƃ���N�Ƀ��f�������ʼn����Ă邯�ǁA�ǂ��l���Ă����ƃR�C�������݂�����A�Ώ̂ɂ͂Ȃ�Ȃ� ���Γ����Ǝ��C��H�I��d��q���̎��C��R�������B
����͎��ۂɎ��C��H�����Ƃ����Ȃ�B����ɃR�C�������Ƃ�荷���傫���Ȃ�B
�Q�l���̎��C��H�@�ł͎��ƃR�C�����ꂽ���ƂɁAN�ɂ�S�ɂ��Ώ̂Ƃ���N�Ƀ��f�������ʼn����Ă邯�ǁA�ǂ��l���Ă����ƃR�C�������݂�����A�Ώ̂ɂ͂Ȃ�Ȃ� >>356
�܂�́A�S�ނ�B-H�J�[�u�Ɉˑ�����A�Ƃ������Ƃł����ˁH
�Ƃ���ƁA�R�A���X���[�^��Lq=Ld�ɂȂ�̂��H
���邢�́A����>>339�̃��[�^���g���ăR�A���X���[�^����ꂽ��A�����Lq��Ld�ɂȂ�̂��H
�^��͐s���Ȃ��� �i�v���̕����̓��������S�Ƃ͈قȂ�̂��傫����ˁH >>358
��u�ɂ��ă����f�B�[���悬�����特�y�D���B >>359
>�܂�́A�S�ނ�B-H�J�[�u�Ɉˑ�����A�Ƃ������Ƃł����ˁH
�ł͂Ȃ��āA���C��H�̕������f���𐔊w�I�ɉ����Ɛ��Ld��Lq�Ƃ͂Ȃ�Ȃ��ƌ����Ă�B �Q�l���Ǝ��@�̌v���̍��Ƃ��āA�C���_�N�^���X�̒�`���グ����B
�x�N�g������̎Q�l���ɂ̓C���_�N�^���X��2���̖��������Ɖ��肳��Ă���B
�����ǁA���[�^�̃C���_�N�^���X����������ƁA������2���ł͂Ȃ�1���̖����ƂȂ邱�Ƃ��o�����ĂȂ��ł��傤���H ���[�^�̎Q�l���ɋL�ڂ���Ă��鎥�C��H�́A��������ԁA���邢�́AN�ɂ�S�ɂ͐��Ώ̂ł��邱�Ƃ�O��ɃR�C���ɓd���𗬂��ĉ����Ă�B���̑O��͎��@�̏�Ԃ��������葨���Ă��炸�A�����Ԉ���Ă�Ǝv����B
�܂��ANS���ΗL��A���A3���R�C���L��̏�ԂŁA�����I�Ƀ��[�^�̎��C��H�������ƁA�K���C���_�N�^���X��1�������ɂȂ�ALd��Lq�ƂȂ�B �������̃x�N�g����N�ɂ���o��S�ɂ�ʂ�܂�N�ɂɖ߂莥�����̃��[�v�����B
�Q�l���ɋL�ڂ���悤�ɁAN�ɂ�S�ɂ����Ώ̂ƂȂ��Ă��܂�����AN�ɂ�S�ɂ���o�Ă��鎥�����̃x�N�g���͂ǂ����������ɂȂ��ł��傤���H
�Q�l���̃��[�^���C��H�͈Ӗ��s���ł��B �w�C���_�N�^���X��2���̖��������x
�Q�l���̂��̉��肪���ł͂Ȃ����H
�Ǝv���Ă܂��B �u�����v�͑���ł��ˁB
�u�g�`�v�Ƃ��ɓ��ꂩ���ĉ����� 1���A2���A�A�A���ɑ���1���A2���H
NS���E��q����S��d����SN���E��q����N��d����NS���E��q���A�����1�����Ƃ��āH
d����q����d���Ɛi�߂Ă̑���͂������Ƃ��邯�ǁA����ɐ�͖�����
����A�f�[�^�T�����邩�ȁAd���ő������߂�͂����Ȃ� �f�[�^�������A���ǁA
NS���E��q����SN���E��q����L,�AN��d����S�̎���L�A���ꂼ��̑g�ݍ��킹�̐��l�͑卷�Ȃ��� >>368
���[�^NS�ɂ̈ʑ������ɑ���1���A2���ł��� >>369
���[�^�̃R�C�����������厖�ł��B
�C���_�N�^���X�͊������̓��ɔ�Ⴕ�܂�����ˁB
���胂�[�^�̊������͂ǂ̂��炢�ł��傤���H(���邢�͑�^or���^�H) ���A���Ȃ�r�炵�Ă��܂��܂������A�^��Ɏv���Ă��邾���Ȃ̂ł��̂ŁA�قǂقǂɁB
(���Ă���������ƍK���ł����d)
�o����A��w�@�ւ̕��X�Ɍ����Ă��炢�����Ƃ���ł��B
���邢�́ALd��Lq�������������Ƃ��āA����𗘗p�������̔����ɖ𗧂Ă�d
�Ǝv���܂��B >>370
NS1�g�ɑ��āA����2���ƌ��킴��Ȃ��A�܂蓯��������2��o�Ă�
���������������Ȃ��Ƃ��A��^���`�͂킩���A�ƊE��ʂ̃Z���X��m��Ȃ��̂�
���Ȃ��Ƃ��}�u�`540�̃C���[�W���͑傫���� �Ȃ�قǁB
�ƂȂ��>>363�̔��ƂȂ�܂��ˁB >>373
�C���_�N�^���X�̒l�̌��͂ǂ̂��炢���킩��܂����H ���邢�́AIPM��SPM���f���Ȃ��ł����ˁH
SPM�Ȃ�C���_�N�^���X�͖������Ȃ��͂��ł����d >>375
SPM�AY�����̑��Ԃ�1mH����ĂƂ�����
����SPM�ł�Lq��Ld�ɂȂ�h�Ȃ� �����ł����B
��肪�Ƃ��������܂��B
1mH����x�ł���Ύ��̒��ł̓t�����W�T�C�Y��80�`100�̃C���[�W�ł��� �ǂ������Lq�̓d���ˑ������𑪂��
�x�N�g�������dq�p���h���C�o��ŌŒ肷��Γd���w�ߒl�A�d���w�ߒl���g���ēd��������������Ld�o�Ă��邯��
Lq�̓��[�^����邩�炱�̎�@���g����
d���d�����\�������Ă����Ύ��Œ�ł���̂�q���d��������Lq���v�Z�ł�����ǁA�������d���d���d�Ă邩��l�����ꂻ��
�o�͎����@�B�I�ɌŒ肷��́H Ld�͊e�X�̊�Ƃɐ̂���|���Ă������@���e�X����悤�Ɏv���܂��B
������Ƃ��ꂻ���Ȃ̂Œ͏o���܂���B
��ʓI�ȂƂ���ŒT���ƁuAC�h���C�u�V�X�e���̃Z���T���X�x�N�g������v�Ƃ����{�ɍڂ��Ă�����@������B
(�d���w�߂Ɠd���t�B�[�h�o�b�N�̒l�A����сA�e�X�̈ʑ�����Ld���t�Z�B������FFT���邩�A���g���t�B���^������K�v����) ����Lq�ł����ˁB
�V���t�g��q���d���������悤�Ƀ��b�N���ēd���̗����オ���������悢�̂ł́H(Lq����V/��t)
�Ǝv���܂����B �g���N���傫�����[�^���ƌ��\��ςł���
���C�O�a��������Ȃ�Z���Ԓ�i��܂œd�������� �ϊ������Ƃ��̌Œ�q�����x�N�g���Ɠd���x�N�g���̊O�ς��g���N��\���ƁA�ǂ̋��ȏ������Ă������Ă���܂����A����͂ǂ����瓱�o�����̂ł����H
�莝���̋��ȏ��ł͓V����I�ɗ^�����Ă������������܂��� >>383
���[�����c�͂܂��̓t���~���O�̍���̖@������̓��o���� �@�B�̉����ɒ��t���̒P�����[�^�[
�v�[���[���Ɣ��Α��œ�mm���x�߂ɂȂ��Ă邯�Nj��e�͈͊O�ł���
���[�^�[���̃v�[���[��V�������ĉ���V�x���g�������������ʂɉ���ĂāA�U�����قƂ�ǂ���܂���
�ł����ďd������Y�����ɂ���l�ł͓����������ɂȂ� �x���g������20�Z���`����25�Z���`���炢 �|�C���e�B���O�x�N�g���A���邢�́A�}�N�X�E�F���������̃Q�[�W�ϊ�����t���~���O�̖@���A���[�����c�͂�������邱�Ƃ𗝉����Ă���l���ǂꂭ�炢����̂��낤���H >>384
�ǂ�����ē��o����̂������Ă��������܂��H
��������v���邱�Ƃ͕�����̂ł����A�ߒ����킩��܂��� >>389
�ϊ��́Adq���ϊ��̂���?�@�������� �g���NT[Nm] = ��[Wb] x Iq[A] �̎����ȁ@������Ld=Lq�̏ꍇ����
�����x�N�g���͒ʏ�d���Ɏ��Ad���Ɠd���x�N�g��Ia[A]�̐����p�x���ƂƂ���� Iq[A] = Ia[A] x sin��
���������� T[Nm] = ��[Wb] x Iq[A] = ��[Wb] x Ia[A] x sin�� �̊O�ς̎��ŕ\����� >>393��>>383�̓����ɂȂ��ĂȂ� �͂ł͂Ȃ��Ȃ��g���N�ɂȂ�̂��ƌ��������̂��H
�����łȂ��Ȃ�P�ɕ����@���Ȃ̂����炻��̓��o����
����ꗝ�_���x���̘b�ɂȂ��Ă���ˁH �Ȃ�Ȃ���
�����̓d�C��H������ >>397
�G�l���M�[�ōl����Ȃ�A�d�����������K�v�ł���
�g���N�̓G�l���M�[����Ȃ�
>>183�͓����ɂȂ�Ȃ���
�܂����͗��ƌ����̋�ʂ��ł��Ȃ��l�H >>398
���[�����c�͂̊W�͂������Ő�������Ă�炵��
ttps://www.tsukuba.ac.jp/wp-content/uploads/170906koizumi-2.pdf MTPA����Ɏg��d���d�����āA�Δ����œ��o�����������A���^�C���ʼn������̂Ȃ�H
������Ld�ALq�̎擾�덷�Ɠd���ˑ��������邩��Œ�p�����[�^����Ў藎���H
�}�b�v�ł��̂͊y�����ǃ}�b�v�p�f�[�^�����̂��߂�ǂ����B >>393
dq�ł������ł��ǂ���ł����܂��܂���D
�ǂ���̎��ł������Ƃ��Ă������Ɠd���̊O�ςŃg���N���v�Z�ł���Ǝv���܂��D
�i���ȏ��ɂ͂��������Ă��邵�C���Ɏ������Ă����̂悤�Ȍ��ʂ�������j
��ˋɋ@�iLd = Lq�j�̃g���N��
�g���NT[Nm] = ��m[Wb] x Iq[A] �i��m���i�v���̑��x�N�d�́j
�ŕ\�����̂�
T = �Ձ~I�@�i�����Ɠd���̊O�ρj
T = ��d�~Iq�|��q�~Id
T = (��m�{Ld�~Id)�~Iq - (Lq�~Iq)�~Id
T = ��m�~Iq + ( Ld - Lq)�~Id�~Iq�@
T = ��m�~Iq�iLd = Lq�̉�����g�����D�j
�ƂȂ邩��ł���Ɖ��߂��Ă���܂��D
�܂�C�����[�^��dq���g���N���́u�����Ɠd���̊O�ς��g���N�ɂȂ�v�Ƃ����O��Řb���i��ł���Ǝv���܂��D
�ł�����Cdq���g���N�����g���āu�����Ɠd���̊O�ς��g���N�ɂȂ�v�Ƃ������Ƃ��������̂͏����Ⴄ���ƁD
�t���~���O���葥����
F = BIl
�ƂȂ�C���̎��̗��ӂ�r[m]�������邱�ƂŎ������g���N�ɂȂ邱�Ƃ͗����ł��Ă��܂��D
Fr = BIlr
T = BIS
T = ��I
���������̂�����̕����I���߂����܂����킩��܂���D �G�l���M�[�ۑ�������g���N�Ɠ����ƓS���͓��o�\
�܂��A�d���U���̖@��������g���N�͓��o�\ ���̌��ʁA�t���~���O�̖@���Ɠ����̖@�������o�\ dq���W�Ȃ�čS���Ă邩��
���[�^�̕����@�����������Ȃ��ƂɂȂ��Ă邱�ƂɒN���C�Â��ĂȂ� dq���W�̂܂܂ł������͂Ȃ����d
��������dq���W�͉�]���W�n���Ƃ������Ƃ��F����Y�ꂪ���ł͂Ȃ����H
�Ǝv���܂��B
���n�̑�w���Ȃ�A��]���W�n�̒��ӎ������炢�����ł���͂��ł��� ID����є�тɂȂ��Ă܂���
ID:PBMB5j79��ID:7hrN2bth�ł� �t���~���O�E�葥���瑬�x�N�d�͂�
e = Blv = Blr��
���x�N�d�͂��z������d�́��������铮�͂Ȃ̂�
P = eI = BIlr��
�g���N�͏o�́��ւȂ̂ł��Ȃ���Fr�ɓ������Ȃ� ���̍ہA���łɌ����Ă����܂��傤��
�w�}�O�l�b�g�g���N�x�Ɓw�����N�^���X�g���N�x�̓��[�^������̑���ł��B
���̓�̗p��̂����ŁA���[�^�̕����̔��W���~�܂����܂܂ɂȂ��Ă܂��B �d�C�H�w�n���h�u�b�N�i�d�C�w��j13�҂�ǂ݂܂��傤 >>412
���ꂪ�����ĂȂ��ƌ������ >>400
�g���N�~��]���x��W�ɂȂ�ł��傤
���Ȃ��̓o�J�ł����H ���[�^�̕����́A�{���������������P���Ȃ��̂ɓZ�߂邱�Ƃ��ł��܂��B
����ǎc�O�Ȃ��ƂɌ��ݏo�ł���Ă��郂�[�^�̖{�ɂ́A�떂������Ă镔�������X�����܂��B
>>383�̎w�E�͂��̈�ƌ����܂� >>404
�Ō��3�̎��́A�t���~���O�̍���̖@�����瓱�o����͎̂嗬����Ȃ��炵��
�S�̃X�e�[�^�̎����̂���ꏊ�ɂ͓����̓d���͂Ȃ��A�t���܂������肾����
�S�S���Ȃ��ꍇ�͂���
ttps://www.nidec.com/ja-JP/technology/motor/basic/00012/
�����x�N�g���Ɠd���x�N�g���̊Ԃ̃��[�����c�͂���]�̊p�x�ɂ��������ĊO�ςŌv�Z����邯�ǁA
�ϊ��ɂ��ĕ��������̂�����A���̂��Ƃ���Ȃ����낤
�S�S�̂���ꍇ�͂���
ttps://www.nidec.com/ja-JP/technology/motor/basic/00015/
ttps://www.nidec.com/ja-JP/technology/motor/basic/00016/
T = ��I�̎��́A��̂ق���URL��(B)���A���ꂩ��>>397=>>183�̂悤�ɐ������Ă���
���͓d��[W] = ���[�^�N�d�������̈���d��[V] x �ʓd�d��[A]�@�i������0�Ɖ���j
���[�^�o��[W] = ���[�^�g���N[Nm] x ��]��[rad/s]
���[�^�N�d��[V] = �ɑΐ� x ��������[Wb] x ��]��[rad/s]
���[�^�o��[W] = ���͓d��[W]�Ƃ��āA���[�^�g���N�̎����t�Z����ƁA
���[�^�g���N[Nm] = �ɑΐ� x ��������[Wb] x �ʓd�d��[A]�@�Ɠ��o�����
Fr = BIlr��T = BIS�̎��́A��̂ق���URL��(A)�ł́uBLI���Ő����ł��܂���v�Ə����A
���̂ق���URL�Łu���������BLI������������v�Ƃ����A�����̈������������Ă����
�����I���߂́A��ʓI�łȂ������I�ɁA(A)�̐}2.19�Ƃ������ƂɂȂ�Ǝv�� �o����Α�w�̊w�����⊮���Ă���邱�Ƃ�]�ށB >>404
���łɌ����ƁA
�u���͓d��=���[�^�o�́v�Řb��i�߂�̂́A
�������[�^��dq���g���N���́u�����Ɠd���̊O�ς��g���N�ɂȂ�v�Ƃ����O��
�Ői�߂�̂Ƃقړ����Ǝv����
�����āA�������N�d�͂����킯�����炳 >>420
>>404�͕����̃g���N����c�����Ă���̂ŁA�����͗������Ă���Ǝv����
���Ƃ��A�͗��͓��͓d���ƒ[�q�d���̗͗��ƁA���[�^�N�d���ƒ[�q�d���̗͗���2�͂��邩��A��ʂ��Ă����Ə�������Ȃ�
��w���ɗ����ĂȂ��ŁA���������Ă��傤������ >>403
Ld�ALq��d�����ɑ��肵�ē��ꂽ���Ƃ����
�����Ă����g���N��Ia����Ia�̒ጸ���ʂ����ς���邵
�}�b�v���Ăǂ������`��?�@���G�ɂ͂Ȃ�Ȃ��̂ł͂Ȃ����� ID:PBMB5j79
�u�Ǝ��̉��߂Œ����_��悤�Ƃ�����̂ł���A�F�߂邱�Ƃ͂ł��Ȃ��v
�Ƃ������܂蕶�傪���Ă͂܂肻�� ���������O�ςƂ͉���
���w��̒�`���猩�������Ă݂��
��������ʂ������邩�Ǝv���܂��B >>422
�V���t�g�Œ肵�Ċe�����Ƃ�L�̓d���ˑ����͎��O�Ɏ���Ă���ǁA�ʑ���ς��Ēʓd�����Ƃ��͎��O�Ɏ����L�l�ɍ����̂��ȁH
d���d���ɂ����q�����̎��C�O�a���N���������Ēu���Ȃ��̂��Ȃ�
�}�b�v�Ƃ����̂�FF�����ł����ˁB�ԗ��I�ɒl�����߂�̂���ςȂ̂Ń��[�^�p�����[�^�Ǝ����珟��Ɉʑ������߂�FB�����������ȁ[�ƁB >>426
�Ƃɂ�������Ă݂���?
���菊�̓g���N���f���������Ȃ��̂ŁA����Id�AIq�Ń��f���Ƌ߂��g���N���o�邩�Ō��邵���Ȃ��ł���
��d���d���ɂ����q�����̎��C�O�a���N����
MPTA�Ȃ�A����̃g���N�悤�Ƃ���Iq�����炷����Aq�����͎��C�O�a���牓������̂ł�?
JMAG���f�����Ƃ����Ȃ�Ȃ��̂���
FF��FB���͕��@�_�Ȃ��ǁA�ŏ�����FB���Ə�肭�����Ȃ������Ƃ��̌��������Ɏ�Ԏ�肻���� �Ƃ���Łd>>416�̍ŏ��̂ق��ł��w�E�����邪�A�t���~���O�̖@��
F=iBL(�d��*�������x*�����̒���)
��]�q�����̏ꍇ�͓K�p�o���Ȃ��B
�����ɗ͂������ĉ���Ă�킯�łȂ�����B
���̕����͉����ς݂ł��傤�� ����͂˂�
�t���~���O�Ɠd���U�������R�ɂ���v�����ł��� >>405-406�𗝉������l������悤�ł�����Əł肬�� �����{���ɗ������Ă���Ȃ�A>>411���Ȃ�ƂȂ��������Ă����͂������d >>430
���҂��Ă�����
�_�l���C����Ă��邾�������� �|�C���g�͓S���͐����ŕ\�����Ƃ��ł���
�������̈ꍀ�ŕ\�����Ƃ��ł���
���������̓S�����͈ꍀ�����Ȃ̂ɂR�̕����I�ȈӖ������� �q�X�e���V�X���ƉQ�d������2�� �Ⴆ�A���[�^���班������邪
�����̒�RR�ƃC���_�N�^���XL��LR��H�ɂāA�d����������
V��RI�{d/dt(LI)
�ƂȂ�B
���ӂɓd��I���������
VI��RI^2�{d/dt(1/2LI^2)
�Ɏ��ό`�ł���B
�E�ӑ�Q����1/2LI^2�́A�R�C���ɒ~�����鎥�C�G�l���M�[�ł���A���l�ł���Δ����ɂ��0�ł���B
�𗬉�H�ł͂ǂ����H �R�C���ɂ��~�����鎥�C�G�l���M�[�́A����Ԃł���Ί�{�I�ɏ����Ȃ������d�͂ł���B
���[�^�ɂ��R�C��������A�R�C���Ɏ��C�G�l���M�[���~�����Ă���B �R�C�����甭�����鎥�����̓A���y�[���̖@���ɂ�胳��LI�Ƃ�����B
�܂��A�t�@���f�[�̖@�����
��������d����V��d/dt(��)������A������\�L���������B ���ȏ��I�ɂ�L�͈��Ƃ������肪�݂����Ă��邪�A���ۂ͎��C�O�a�Ȃǂœd���̑傫���Ɉˑ������肷��B���̂���L�͈��l�Ƃ͂Ȃ�Ȃ��B �ŁA�b��߂���
>>437�̃R�C���̎��C�G�l���M�[���́A1/2LI^2�����ԕω������Ƃ��̂ݑ�������������B��������[�^�̑����ɉ��p����Ɓd ID:x1mAdiwe=ID:JjV+hGJz
����l���H L���łȂ��Ȃ�I���|�������Ԉ���Ă�� >>444���ԈႢ�ł�
���̕\�L�ŃI�[�P�[
�Ⴆ�Ή^������������G�l���M�[�ۑ������o����Ƃ������̕����œ��o���܂� ����>>444��������
�A���A���[�^�͂��̕\�L�ł悢 ���[�^(���邢�͌𗬉�H)�̏ꍇ�A
�������ƌĂԂׂ�������������B >>436
�}�C�N�̃^�C�E�E�E�@�����A���T��R�i���̃{�C�X�`�F���W���[���I �s���I�g���R�ցE�E�E�E�g���N�s�i�� >>404
�Ƃ���ʼn��̂��݂̓x�N�g���̐����������Ȃ菑���Ă��H
�O�ς̌v�Z�ŋ��܂�̂̓X�J���[�ʂ���Ȃ��x�N�g���ʂ���
https://ja.m.wikipedia.org/wiki/%E3%82%AF%E3%83%AD%E3%82%B9%E7%A9%8D ����PMSM�Ŏ���FB��120�x��`�g�ʓd�ƃx�N�g�������Id=0���䂾�Ɩ�����]���͂ǂ��炪�����Ȃ�̂ł��傤���B
��`�g�Ɛ����g���ƑO�҂̕������s�d���͍����݂����ł����A120�x��Ԃ����ʓd���ƒႭ�Ȃ邩��x���H �ǂ��ł����x�N�g������@�卷�Ȃ�
�s�o���ȃx�N�g������@��`�g�������g
�Z���T�ɐi�p�̂���120���@��`�g���������g ���������̂������_��̘b����Ȃ��́H�X���ɐ搶���邶���w PWM�s�[�N�̒l�����������������Ȃ����ł��܂�ˁB�������Ȃ炭�����g�̂ق���4/�����傫���B 4/����180�x��`�g�̒l�������悤�� ���[�^�[�ƃX�e�[���t�����̃T�C�h�̃S��
�Ǝ҂��v�[���[���߂����ይ�����ߕt���ăS������������オ���Ă邯�ǂ����̂�H SPM�Ŏ�ߎ������䂵�Ă�Ԃ��g���N��q���d���ɔ�Ⴕ�Ă�́H
�{�ɂ͒�g���N�Ȑ���d���ɕ��s�ŕ`����Ă邯��
d���d���Ŏ�����߂Ă�̂ɓ����ς��Ȃ��̂��Ƌ^�� >>459
���̎w�E�����ˁB
�O�ҁA���͂��Ă��B���������N�^���N�g���N�g���N���Ă����̂��������蔭�����Ă�B >>460
�����N�^���X�g���N���������Ȃ�Ld=Lq�̗��z��Ԃ��ێ�����Ă�Ƃ��āAd���d��=0�`-5A�܂ʼnς��Ă��Aq���d���������Ȃ�g���N�͓����Ƃ������Ƃł��傤�� d���d���̍�鎥���ƃ��[�^�[���̎������Ȃ��p���l����悢 ���ۂɃg���N���v������ƁAq���d���ɔ�Ⴕ�Ă��Ȃ����Ƃ͂܂܂��� >>461
���������ǁd�A
��������Ld��Lq�ɂ͐�ɂȂ�Ȃ�
��ꌴ���I�ɏؖ��\�B
Ld��Lq���F���̓�����O�̂悤�Ɉ����̂ł��傤���H �Ⴆ�AJMAG�̋@�\�Ń��[�^�̃C���_�N�^���X���v�Z���邱�Ƃ��ł��邪�A���ΗL��Ɩ����Ƃł͑傫�����ʂ��قȂ�B
����͂��������v�Z�����d�d
���ɂ傲�ɂ� ���łɌ����ƁA
Ld��Lq�ƂȂ�Ȃ��͎̂��C�O�a�������ł͂Ȃ� ���łɌ����ƁAID:Rc/WUz+x�͂��̗��R����x�������Ă��Ȃ� �����ƁA���[�^�̗��_���������Ă��Ȃ����炾������ �܂�͗��_��������������A�������_���\�z�����ҏ������Ęb�B
�ʂɏ�̘b�͔������ƍl���ăX���[�����Ⴆ�悢��B >>459
�Ƃ���ŁA
����g���N�Ȑ���d���ɕ��s�ŕ`����Ă�
���Ăǂ������Ӗ��H
Ld=Lq�Ő�����i�߂����ʁAId-Iq���ʂ�Id�ɊW�Ȃ�Iq�����Ńg���N�����܂�A���Ă��Ƃ� >>468
���ڂ͌����ĂȂ����ǁA�q���g�͂��̃X�����ɒ��Ă� ���C�O�a�܂Ŏ���Ȃ��Ă�Ld��Lq�͕ς���
B-H�J�[�u������Ζ��炩 >>473
����͗�������Ƃ�����
��������Iq�ƃg���N����Ⴉ��O��闝�R���킩�������� ����_�̘b�H
�܂��A���ꂾ���������ł��Ȃ� ����_�ł͂Ȃ��ȁA���Ȃ��Ƃ������I�Ƀ����|�C���g�Ō��܂�b����Ȃ� ��������тт��Ă邪�A����Ŋ����������� �Ԃ����Ⴏ�ASPM�AIPM�����ȃ��[�^�����ۂ�Id�AIq���������Ȃ���g���N�v���������Ƃ��Ȃ�
���㗝�_�����̂�ɂ͂킩���� >>472
�����ł��B
Id�̒l�A�����Ɋւ�炸Iq�����Ńg���N�����܂邱�Ƃ��Ӗ����Ă���悤�ł��B
�����Ɠd���̊O�ς��g���N�H�Ȃ玥����߂ăg���N�����Ȃ̂������ł��Ȃ��āB
�������������Ⴂ���Ă邾�����Ǝv���܂����B �ƁA�v�������ǂ����̃J���`������ >>481
����͂ˁA�E������߂�A�Ƃ��A��ߊE���A�ƌ������t�Ɉ��������Ă��邩�炻��������킯
�d���x�N�g���}��́A�r�o�l�ł͋N�d�������炵�ď����͂��Ȃ� �ЂƂ���
���[�^��d���Ƃ�q���Ƃ������Ƃ������Ƃ��A����Ȃ���Ȃ���l�����ɉ���Ă� �����烂�[�^�������dq���W�A���邢�́A�������W�Ɉ��������ă��[�^���l����悤�ɂȂ����̂��d�d dq���W�̓C���_�N�^���X�s��̓��ʂȏꍇ�̌ŗL�x�N�g���ɉ߂��Ȃ��̂� �Q�l���ɂ̓��[�^�̕����@������L�ڂ��Ȃ� �̑�ȓN�w�ҁA�ϗ��w�ҁA���w�҂ł���o�[�g�����h�E���b�Z�����̌��t���
�w���Ԃɒʗp���Ă���S�Ă̑O����ᖡ����x ���S�N���b�`�͉Ήԏo��̕��ʂł�����
�Â��̂��I�o�z�o�����̂��o�܂� ���l�́A���������͂��������l��m���Ă���ƌ��������Ȃ��Ă��܂� �T�[�{���[�^�p�r�Ńu���V���X���[�^�ƃX�e�b�s���O���[�^������݂����ł����A������ɐ��ݕ���������Ă���̂ł��傤���H
�ŋ߂̓X�e�b�s���O���[�^�ɃG���R�[�_�t���ăx�N�g�����䂵�Ă�݂����ŁA������ău���V���X���[�^�Ɠ����ł����
�ɐ��������̂ō���]�͌��������ł����� ���̍���]���������邽�߂炵����
ttps://patents.google.com/patent/JP2014158357A/ja >>464 >>487
�����܂���A�����ł��ĂȂ��ł��B
���@��id=0�ʼn���͈͂̑��x����������āA�������狭���I��id�w�ߒl������Ƒ��x�͕ς�炸��iq�w�ߒl�������܂����B�d�������͂����ĂȂ��ł��B
iq�������Ēނ荇���Ƃ������Ƃ́A�����g���N���������Ă���H
�����N���Ă���̂ł��傤�� �̏Ⴕ�Ă�Ƃ��G���R�[�_������Ă�Ƃ��̈Ӗ��ł͂Ȃ� �q���g�Ȃ́H�����Ȃ́H
�q���g�Ȃ炻�̂܂ǂ���������̂͂Ȃ�Ȃ́H����̊ϓ_�H >>500
�������ቺ�������AIq�������āA���A���������������ꂽ �A���炻�̂��̂����ɏo��������
�����Ƃ��Ƃ̐l�ԂȂ�ł�
�Ȃ�Ƃ��C�Â��Ă��� ����Ȃɂ������Ɣ閧�I�ȓ��e�Ȃ̂��H ���p����Ƃ��Ȃ�L���Ȕ������ł���B ������
���Ⴀ�܂����������Ȃ��Ƃ� �����䂤���Ƃ�
�܂��A���̂����g�͂��� >>500
���ꂽId�͐i�݁A�x��̂ǂ����̕������ȁH
Id�𐳕��ɉ��_���U���Ă݂�Iq���v���b�g���Ă݂�A�����N�����Ă��邩�킩�邩���� >>500
���x����w�ߒl1000rpm�Ƃ���1000rpm���ێ����Ă����������
id=0���Aiq=1
�x�pid=2���Aiq=0.37
�i�pid=-2���Aiq=1.5�ł���
>>464�ł������������Ӗ����邱�ƂƎ����������Ⴄ�̂ł��傤��
�m����Ld=Lq�ł͂Ȃ�Lq>Ld�̃��[�^�[�ł��� �A���J�ԈႦ�܂���
>>512���ł��� >>514
�m���ɒ��ςƋt����
�N�d���ʑ��ɑ��ēd���ʑ����x�ꁨId�̕����͐�
�N�d���ʑ��ɑ��ēd���ʑ����i�݁�Id�̕����͕��A���̔F����>>514�ƍ����Ă���悤��
SPM�ł�Lq>Ld�ɂȂ邱�Ƃ͂��邯��ǁA���̑召�W�Ń����N�^���X�g���N�����ɂȂ�̂�Id�����̎��Ȃ̂ŁA
3�̃g���N���������Ƃ�����Id�̐������t
�������A���������ւ���g���N����v����킯�ł��Ȃ�
�ǂ����Ɏv�����݂������Ȃ����A���ċC�����邪�A�A�A
�����v���@����ʒu���A�ǂ����킩��Ȃ� �ǂ�Ȍ������烂�[�^�̗������X�^�[�g���Ă��邩�悭�Q�l����ǂݒ����ĉ������ƌ��������ł��ˁB
>>411�͂��Ɣے�o���Ȃ��Ǝv���܂� >>519
�{���ɂ킩���Ă�l�͂���ȉ͂��Ȃ�
�����̃X���������� ���������ǁAq�����i�ݕ�����15�����x����Ă� >>520
�܂��A�ʂɗ��������X���[���Č��\�ł��B >>521
����̓G���R�[�_������Ă�ƌ����Ă���̂Ƒ���Ȃ� >>521
�h���C�o���dq�p��0�ɌŒ肵�Ĉ������Ă���Ă��܂����A�d��������Ȃ��Ă��ꂽ�̂ł��傤��
���̏�Ԃŗ���]�����ē����덷��1%���Ȃ��̂ō����Ă���Ǝv���Ă��܂�����
�킩��Ȃ��Ȃ��Ă��܂���
�ꉞ�d�������-id�𗬂��Ɖ������Ă����܂��̂Ői�ݕ����ŊԈႢ�Ȃ����� >>525
�d��������Ȃ��āA���Ă��Ƃ͂Ȃ��Ǝv����
�p�x���o�̓G���R�[�_�H�@���]���o�H�@����Ƃ��Z���T���X�Ő���H
���ƁAVd�AVq�̌덷�͂Ȃ����ȁH�@�d���ƕ��ׂ̃C���[�W���N���Ȃ��̂łȂ�Ƃ������� >>525��>>526
������������̊�{�̌��t�������g���ĂȂ� ������x�q�ׂĂ����܂���
>>415 ���́A�x�N�g������̎Q�l���ɂ͕����̖@������؏o�Ă��Ȃ��̂��B
�����ǂ�������l�����܂肢�Ȃ��̂��c�O�ł��B ���[�^�[�̋��ȏ����Ăǂ�ȃ^�C�g���̖{����ԂȂ́H ���肪�Ɓ[�@�Ï��X�̍Ɍ������Ă��� �u�b�N�I�t�y�V�s��X�ɍ��ڂ����c���Ă����ǔ���ꂾ������E�E�E�i�L�G�ցG�M�j
�����Ȃ��������ǁA�Љ�肪�Ƃ��E�E�E ���Ȃ݂Ɋe�{�̕]���͉��L�̒ʂ�
��Ԗ�:�N�Y�{(���̖{�̂�����ry)
��Ԗ�:�������N�Y�{(�A���Ō�̏͂̂��܂��̕��������]���ł���)
�O�Ԗ�:�܂��܂��ǖ{(�A���~�X���[�h�L��)
�l�Ԗ�:D���q�ƌĂ�鍀���킴�킴�����Ďg�p���ĂȂ���ΗǏ��������B�Ƃ������M�҂��炢�̎��͂������Ld��Lq�ɋC�Â������Ȃ̂�
�ܔԖ�:��w�̋����������Ă邾�������ĕ��f�x�N�g�����l�B�������킩���Ă�B�A���~�X���[�h�L��B�܂��A���̖{�ɗB��A�����X���b�g���[�^�̋L�ڗL�� ���\�����������Ă�{�����グ���ĂĂ�炽
���Ɩʔ����������瑼�ɂ��{���Љ�Ă�
�m���Ƃ��͎���o���ĂȂ��H �ԊO�҂ʼn��̂��̂��N�Y�{�Ƃ��ďЉ����
�ȃG�l���[�^�̌����Ɛv�@ ~�i�v���Γ������[�^�̊�b����v�E����܂�~ (�v�Z�p�V���[�Y) https://www.amazon.co.jp/dp/4904774094/ref=cm_sw_r_cp_apa_i_-P.5BbQSWCA5G
�ʔ����̂͏ȃG�l�������Ă邭���Ɂ����̋L�ڂ����܂�ɕs�\�� >>536
�����Ă�́H
�Ӗ�����́H �_�l�����ł������Ă����Ǝv���Ă͂����Ȃ� ����B����
�N�Y�{�Ƃ����łȂ����̂̍��́����ɏW��ł��� �����͓d�C�Ȃ���
�d�C�̌��t�ŕ�������Ă�������
�@�B���������������Ă܂���ˁH �펯��������Ă���Ԃ�
���[�^�[���[�J�[������������������������I�I
�߂����ۂ��ƃ}�u�`���[�^�[ >>545
����������݁`��Ԃ�̂��c�i�E�́E�j�C�C�I�I >>546
�Ж��̓}�u�C���[�^�[�ł�낵�� ������ł�
�����Ă��@�P�ʎ��ԓ�����̎R�̐����ς��Ȃ��Ȃ��]���͕ς��Ȃ��悤�ȋC�������ł���
�Ȃ�Ŋ���Ɖ�]���������ł����H�H�i�E�ցE�G�j
 >>549
>>549
����̓Y���ł��芊��Ƃ͌����܂��� �ʑ���������x�������ĂȂ��Ȃ�ʑ��ɂ���Ă͋t��]�����ɓ�����������肵�Ȃ���ł����ˁH >>551
�P���U���d���@�Ȃ牽�炩�̕��@�ňʑ�����^���Ȃ��Ǝn�����Ȃ����^�����ʑ����̕����ʼn�_���������܂�B
�R���f���T�n���Ƃ��F��R�C���n���Ƃ�
�O���U���d���@�Ȃ�3�{�̐��̐ڑ��̑g�����ʼn�_���������܂��Ă��܂���B
��]���n�߂�Ɗ��������邩��t��]���邱�Ƃ͂Ȃ��B ���[��ނނށB�B�B
�����A���ƗU�����[�^�[�ł��������A����P�̂Ƃ��@�g���N���ő���Ă����̂����܂����s���Ƃ��Ȃ���ł���
�ǂ��l����Δ[�����₷���̂ł��傤���E�E�E�H�H �t�ɍl����ƁA�s���Ƃ�����[�������肷��K�v�͂���̂��� >551�̌����ʑ���>552�̎n���̂Ƃ��̈ʑ��͑S���Ӗ��͈Ⴄ�̂����ǂˁB >>549�Ɏ���ł�
�P�ʎ��ԓ�����̎R�̐����ς��Ȃ��Ƃ͂Ȃɂ̎R�ƂȂɂ̎R�̂��Ƃ������Ă�̂ł���?
�ȂU��fishing�ɒނ�ꂽ�݂����Ȋ����Ȃ̂� �d���g�`�̎R�̂��Ƃ��Ӑ}���Ă��܂���������ȊO�ɂ�����̂ł��傤���H >>553
��ᐄ�ڂ����p���ēK�ɊǗ����ꂽ�ꍇ�����ł��ˁ����ׂ�P�Ńg���N�ő� ����ł��B
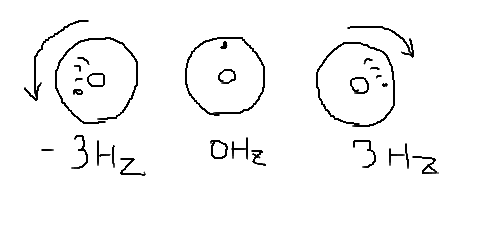
�U�����[�^�[�łRHz��]�ʼn�]����������Ă��鎞�A
S=0����]�q���RHz�ʼn�]����Ƃ��A
S=1����]�q����~���Ă��鎞
S=2�͋t��]�łRHz��]���Ă��鎞�A�Ƃ��������ł�낵���ł��傤���H
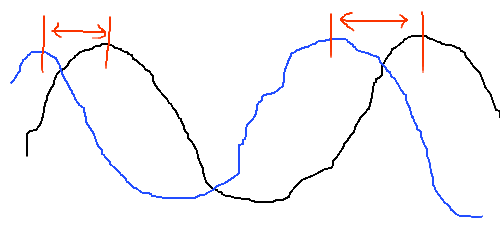
 ��`�I�ɂ͉�]���̍��Ɖ�]���̔䂾�����悤�ȋC�������̂ł���
��`�I�ɂ͉�]���̍��Ɖ�]���̔䂾�����悤�ȋC�������̂ł���
�N���J�n���Ɋ��肪�P�Ƃ����\�����ǂ����œǂ悤�ȋC�������̂ł��̊�����~������>>559�̉��߂Ƒ�����܂����B �N�����ɂقڊ���1�ɂȂ�͉̂�]���x���ق�0rpm�����炾��
�����ꂸ���̓�����݂Ă���킩���Ƃ���čl����
https://youtu.be/LW_jxKldiLk >>562
�ǂ����ł��B
�����]�����m��
��]�q��]�����m��
����@���@���@�i�m���|�m���j�^�m���@�E�E�E(����T�F�P�O�t�߁j
>>�T�T�X�̒l�Ă͂߂Ă݂��
�U�����[�^�[�łRHz��]�ʼn�]����������Ă��鎞�@�@���@�m�����R
��]�q���R�g���̂Ƃ��@�����i�R�|�R�j�^�R���O�@����̓[���ł��ˁB
��]�q����~���Ă��鎞�A�����i�R�|�O�j�^�R���P�A����͂P�ł��ˁB
��]�q���|�R�g���̂Ƃ��A�����i�R�|�i�|�R�j�j�^�R���U�^�R���Q�A����͂Q�ł��ˁB
>>559�̒l�ł����Ă���悤�ł��ˁA
���肪�Ƃ��������܂����B �}�C�i�X�̎��g���ĕ����I�ɂȂɁH
����������
�}�C�i�X�̎��g�����ăt�[���G�ϊ��̂Ƃ��ɕ\��鋤���ȕ��f���ł����������Ƃ��Ȃ� Nr���}�C�i�X�̂Ƃ����āA
Ns���}�C�i�X���� ��]�̌����Ł@�{���@�|���@�ȁA�ƁB
 ������Ns���t�����ɐi�ގ��E�����Ă�Ȃ�ANr���t�ɂȂ邾�� �킩������A���Ⴀ�b�b�v�R�g���ʼn�]���Ă���ϑ��n�ŕ\�����Ȃ����o������f����H
������Ns���t�����ɐi�ގ��E�����Ă�Ȃ�ANr���t�ɂȂ邾�� �킩������A���Ⴀ�b�b�v�R�g���ʼn�]���Ă���ϑ��n�ŕ\�����Ȃ����o������f����H
�U�����[�^�[�łb�v�UHz��]�ʼn�]����������Ă��鎞�@�@���@�m�����U
��]�q���b�v�U�g���̂Ƃ��@�����i�U�|�U�j�^�U���O�@����̓[���ł��ˁB
��]�q���b�v�R�g���̎��A�����i�U�|�R�j�^�U���P�^�Q�A����͂O�D�T�ł��ˁB
��]�q����~���Ă���Ƃ��A�����i�U�|�O�j�^�U���U�^�U���P�A����͂P�ł��ˁB�@�@�@����H�I�i�O���O�G�j >>568
�E�E�E��]����Ɉ˂炸�O�͂Ŗ������t��]�����Ă����Ԃ�z�肵�Ă��܂��E�E�E �X�e�b�s���O���[�^�[��
http://akizukidenshi.com/catalog/g/gP-05710/
�u���b�h�{�[�h���PIC�A�g�����W�X�^�A�_�C�I�[�h���g���ē������Ă݂��炤�܂������܂���
������
�W�����V���N�^�C�v�c�l�n�r�g�����W�X�^�A���C�@�s�a�c�U�Q�O�W�S�`�o�f
http://akizukidenshi.com/catalog/g/gI-12536/
�����������������ƊȒP�ɂł������ȋC�������ł����A�ǂ��Ȃ�ł��傤���H
�Ȃk�d�c�Ƃ��p�݂����Ȃ�ł���
���[�^�[�̋쓮�d����7.5�u�قǂł��B �Ƃ���Łd�A
�Ȃ�Ŋ���1�̂Ƃ��Ƀg���N���ő�H ��ᐄ�ڂŃs�[�N��S=1�̂Ƃ���ɂȂ�悤�ɐ���ł������̂͂Ȃ�����ˁH
 ���ȏ�������������������������Ă��� ���낢���ς���
���ȏ�������������������������Ă��� ���낢���ς���
��������C��������悢�� ���[�^�[�Ȃ�ĂقƂ�ǐG�������ƂȂ��Čv�Z�Ƃ����������̂����Ō���Ă�X�� >>564
-3Hz�͎��E��]���x�Ƌt��]���Ă��邱�Ƃ�\���Ă���Ǝv�����ǁA
���̎��̂��ׂ�l���`����Ӗ��͂���̂��͂�����Ƌ^�� ���ׂ肪1������A
�u���ׂ���Ă������x������˂����I�v
���Ă��Ƃ��킩����ĈӖ����炢 ���x����ŃI�[�o�[�V���[�g���������Ȃ��ꍇ�API���䂾�Ɖ������]���ɂ��Ȃ��Ɩ����H
���x�T�[�{�ш�͓d���ш��1/5���炢��P�Q�C���ݒ肵�āAI�Q�C���͍X��1/10�Ƃ��Ă�B ��������S���]���ɂ��������Ɛϕ��̌W�������������ăI�[�o�[�V���[�g�}������Ȃ�
���������g������Ȃ�Ă��̐��ɕK�v�Ȃ����ɂȂ�H ���������Ȃ��Ȃ�P�����ŃX�p�b�ƌ��܂邾�낤�� ������ĉ��������]���ɂȂ��ĂȂ����Ď��Ȃ́H
�e�������Ȃ����Ă�������� �Ԃ����Ⴏ�����햳���Ă��Ȃ�Ƃł��Ȃ� �V�~�����[�V�����Ɉʒu������ꂽ���`����̏I���ŃI�[�o�[�V���[�g�����ď�肭����ł��Ȃ�
�I�[�o�[�������Ēv���I���Ǝv�����ǁA�ǂ����Ⴂ���H ��`�̖ʐς��ړ����������ė������Ă邩�H
�c��̋������킩��Ō�̎O�p�`�̌`���m�肾�� ��ʓI�炵���H�������[�g�A�ړ������A�ō��������`���x�p�^�[�����߂āA�G���R�[�_�J�E���g���Z�����ʒu�w�ߍ���Ă���ǂ��ꂾ�ƑʖځH
�����I���łƌ����I���ňʒu�������ˏオ��
�ʒuP�����xPI�Ƃ��Ă� �I�[�o�[�V���[�g�����Ȃ����Ȃ�Q�C�������邾�����Ǝv����
���ɐϕ��� �����I���ňʒu�����鎞�_��
�w�ߒʂ�������ĂȂ�
�ނ���ϕ����߂ŁA�����x���グ��
�����I�����̈ʒu�����k�߂Ȃ��Ƃ����Ȃ�
>>588�A589�͑f�l >590
�x��ĒǏ]��������I�[�o�[�V���[�g���Ȃ���Ȃ��̂��ȁ`�H �܁A���낢�낢�������Ă���Ă݂�����킩�邳 >>591
�x��ĒǏ]���Ă鎞�_�Ń_������
�Ӗ��킩���ĂȂ�����H �Ă��ǂ�Ȃ�PI(D)�Q�C���Ŋ撣�낤��
�ő�g���N���������[�����g�������x�������Ȃ邱�Ƃ͂Ȃ��B
��̖ڈ��l >593
�ʒu��P�ő��x��P+�アI��������x��Ă��I�[�o�[�V���[�g���Ȃ���Ȃ��́H ���x���I�[�o�[�V���[�g���Ȃ����Ă��Ƃ͑��x�w�߂ɑ��Ă��Ȃ�x��Ă��������ǁA���K�������́H
��`�������͑��x�x��ňʒu��+��A�������͕ς�炸�A�����J�n���͈ʒu�����������Ȃ�܂Œx��Ă��猸���J�n�����x�����x��ňʒu��-��݂����Ȋ����ɂȂ肻�� �������͈ʒu���c�����܂܈ێ����Ă���Ă��Ƃ����
�d�Ԃ�GO�I����Ă�
1�q�x��ő����Ă�̂Ɍ����J�n�܂ňʒu���Ȃ��łǂ�����́H
���A�Ȃ�ŗ\��ʂ�����ł��Ȃ��́H
P�Ƃ�PI���O�ɉ��������������� >>594
�́H
��`�J�[�u�Ǝ����x���������Ă���
�ϕ��Q�C���Ŏ����x���グ����Ă̂�PID�̐ϕ����Ȃ��H
�f�l���� >>598
��1�q�x��ő����Ă�̂Ɍ����J�n�܂ňʒu���Ȃ��łǂ�����́H
���m�R���̔ނ������l���Ă��̂��ȁE�E�E >>598
>>587�̑��x�p�^�[�����������炷��ƍō��������Ă���ۂ����瓙����=�ō����ŕ�������
�C�i�[�V���ł��߂����łȂ��H ���������ʒu���Ő��䂵�Ă�
���������Ēv���I�Ȍ��ׂ�
�������x������ɂ������Ĉʒu���O�Ŏ~�߂�悗
�Ȃ�ňʒu������H �O�a���Ă邯�ǃA���`���C���h�A�b�v�������Ƃ��B �����N�挩��Ɗ�{�͑��x����݂̂��ď����Ăď���������
���[�v��ւ��Ă�̂� ����A���ʂɍl���Ĉʒu���Đ��䂷��Ӗ��ˁ[����
���O�A�d�Ԃ�GO�I�^�]����Ƃ���
�w�܂ł̋����ɂ���ăA�N�Z������ς��邩�H
�ō����ɒB���Ȃ������Ȃ�ʂ����A�W�ˁ[����H
�����ő�`�̌`���m�肳���đ��x����Ȃ�
�ʒu����̂̓z�[�������Ď~�܂�Ƃ�������
�c�苗���ɔ�Ⴕ�����x�ɗ��Ƃ����� ���₵���l����̃R�����g2018/11/29 22:00:05
���肪�Ƃ��������܂����B
��ւ��^�C�~���O��������ł��ˁB
�ق�ƁA�o�J������ ���x����ւ̎w�߂��ʒu����Ȃ���\������������ ���x���[�v�̍œK�Q�C���͋@�B���̏���(��ɋ@�B�萔)�ŕς���Ă��܂����߁A��o���Ȃ��B
�g�`�̉�������n���ɍœK��T���Ă������� �C�i�[�V�����ĉ����x�Ɠd������v�Z����ƃm�C�Y�������Ēl������ǂǂ�����Đ��肷��́H�R�M���O�傫���ƍX�ɒl��Ԃ� �Ȃ�ʼn����x�Ɠd������v�Z����́H
�A�z�Ȃ́H �^�]���ɂ���ȊO�Ő��肷����������Đ搶 ���א���͓����Č����������삾��
����ƌ�����614�͋�̓I�ȃ��[�h0���� >>617
��̓I�ɉ��������|�����ł����H
(��) ���U�Ń}�E���g���킷��ȉ��ǂ��z�� �t���f�����琧��n�������������Ƃ͂Ȃ���
�X�e�b�v�����݂Č��߂Ă�� �U�����[�^�̃x�N�g��������āA���[�^�̃C���_�N�^���X����Ȃ��ĘR��C���_�N�^���X���K�v�Ȃ�ł����H
����Ƃ��O�H�̃C���o�[�^�̃��[�^�萔������Ƃǂ���C���_�N�^���X����Ȃ��ĘR��C���_�N�^���X���p�����[�^�Ƃ��Ă���̂ŁB
�T�[�{�̃x�N�g���������{�ōl���Ă��܂��Ă���̂ŃC�}�C�`�s���Ɨ��Ă��܂���B �Ԃ����Ⴏ�{���v���
����ƎO�H�̋Z�p�͂��V���{������ ���@�Ɛ��w���f���̍����o�����ŘR��C���_�N�^���X�̂����ɂ��Ă邾��
����Ȃ���{���̓K�`�ŗv��Ȃ� ���[�^����ň����O�H��荂���Z�p�������Ă��Ђ��Ăǂ�������� ���[�^�[�̉�Ђɂ����ł���
���[�^�[�̃C���o�[�^�[�t�߂̉�H�}���ǂ߂܂���
FET�ŃX�C�b�`�J�p�J�p���ăR�C���ɓd���𑗂荞��ł�Ǝv����ł���
��R��R���f���T�̑I��͂ǂ�����Ă�������ł��傤���c >>626
�܂��A�R�C���ɗ����d�����ǂ�����Ηǂ�����ǂ��l����B
���ꂩ��A�ψ��A�ψ��A�T�C�Y�A�R�X�g�A�M�����̂��Ƃ��ǁ`��
�l���đI�肷�������Ȃ��� �~ �ψ��A�ψ�
�� �ψ��A�ϔM�A���M �ŋߊC�O���[�J�[�̃T�[�{��I�肵�ĂċC�Â������ǁA�T�[�{�Ƃ����U�����[�^�����j�A���_�C���N�g�h���C�u����������d�l�̋@�킪�����ċ�����
������낤�Ǝv���ł��邾�낤���ǎd�l�Ƃ���搂��̂��������Ƃ������E�C����� �H�H�H
�����̔ėp�C���o�[�^�Ȃ�\�ł��� �����p���[��H���L����
����͂��܂��݂����Ȃ���
�Ȃ�ł��o����@����̂͊ȒP
�����������������[�^�[��������Ďg�����[�U�[�Ȃ�Ă��Ȃ�����
���v���Ȃ� ���[�^�̕����萔�����Ă��d�����͂̉�������p�����[�^����ł��邩��ȁB
���[�^�̃Z���T���X�����e�Ղɉ\ �Ƃ�����>>631�͎Г��Z�p�͂���Ă�ɓ������B
�����̊�Ƃ����肪�\���� ���܂����炯�̉����Z�p�͒��Ƃ�
�܂Ƃ��ȋZ�p�����ɖ����Ƃ������낗 ���[�^�̉�]��(�ʓd��)���R�M���O�g���N�̉e�����Ă����ł����H
�Ă�����ʓd���Ă�Ƃ��̓R�M���O�g���N�͑��݂��Ȃ��Ǝv���Ă���ł����ǂ�������Ȃ������Șb�����ɂ����̂� ��d�����Ȃ�R�M���O�g���N�̉e������B
�܂��܂��d�����ꂽ��g���N���b�v��(���Z��)���x�z�I�B �g���N���b�v����2�������͎��C���d����3�������g�̃A���o�����X�������B
6����5,7�������� ���Ȃ݂Ƀg���N���b�v���̓��[�^���L���[��X�e�[�^�X�L���[���������Ώ����Ȃ��� ��Ђ̋@�B�̃��[�^�[�̎��Ƀv�[���[���t�����
�Q�������l�W�ŌŒ肷����́A�Е��̓l�W�p�̉������Ă��邩����܂Ȃ�
�����Е��̃l�W�����镔���͉~�̕����Ƀl�W�����邩��悭���ނ̂��
T ���ׂ̍������`�ł������߂Ă���ǂ�
���Ƀ��`�F�b�g�şӐg�̗͍��߂�Ɛ܂�邩�r�߂������������ĂȂ����� ���[�^�[�Ƀo�C�u�t������傩������ 200V60Hz�n��d�l�̃��[�^�[�@���50Hz�n��Ő���Ɏg���ɂ�
�O��200V�ɎO�H������̃C���o�[�^�[�i���[�^�[�̂Q�A�R�{���炢�̏o�͂́j��
�ʂ��ďo��60Hz�ɂ��ă��[�^�[���Ȃ���悢�ł����H �����g����60Hz�Ȃ炻��ł����ł� ���b�e�V���[�^�[�ɂ́A�ǂꂮ�炢�̌�����Ђ悤�Ȃ̂ł����B �����24bit�̃T�[�{���邯�ǐ��������܂ŕK�v�Ȃ̂��Ƌ^��Ɏv�� 48V�`100V���x��20HP�ȏ�̃u���V���X�����̖������ˁB 100V�Ȃ�AC���[�^�[�ł�������� >>652
����̐l�Ԃł͂Ȃ��ł����A
����܂��B
24bit���邩�炱���o���邱�Ƃ����� 24bit���ăp���X�o�͊�łǂ�����Đ��䂷��� �����6000rpm�ʼn�قǃp���X�o����@�킠��́H >>661
�ꕪ�Ԃ�6000��]������A�債�����ƂȂ��C������ 24bit/6000rpm�Ȃ炨�悻1677Mpps�ɂȂ邩�� �f�l����Ő\����Ȃ��ł����ǁA�Ȃ�ŃT�[�{�̈ʒu����͔�ፀ�����Ȃ�ł����H
���x�E�d���͔��ϕ��������āA�ʒu�����͔��ł悢���R���悭�킩���ł��B ���x�͕��ׂ��ς��Ες�����
�ʒu�͕��ׂɊW�Ȃ����炭����Ȃ��t�B�[�h�o�b�N���s�v >>667
���̈ʒu�ɂȂ�悤�ɐ��䂷�邩��B �ʒu�͑��x�̐ϕ��Ȃ̂Őϕ�������Ȃ��Ă��X�e�b�v�w�߂ɑ��ē������f��������������ł� >>668��>>670���čl���Ă݂āA
�����̌��t�ɂ͗��Ƃ��ĂȂ����ǂȂ�ƂȂ��C���[�W�͂��܂����B
���ׂƈʒu���W�Ȃ��̂͂��̒ʂ�ł��ˁB ���̃X�����x�[��������˂��ȁE�E�E >>670
�����ŏ����Ă����B
�ؖ��ɂȂ��ĂȂ�����B ��o���W�����P���ňꌾ�Ŕے肵����}�E���g������肷�邱�Ƃ������ˁB
�킩���A���������l����������ł�낤�ȁB ���̋ƊE�A�o���������Ō���������ł�����B
>>670�͂��̓T�^ ���x���[�v�̕��[�v�`�B����P(s)�ƒu���Ƒ��x�w�߂�����ʒu�܂ł̓`�B����P(s)/s�ƂȂ�܂��B
�܂�P(s)�͈��肩��s=0�ɗ�_�������Ȃ��Ƃ��܂��B
�����ŃQ�C��K�ňʒu���ᐧ�䂷��ƈʒu���[�v�̕��[�v�`�B��G(s)��
G(s)=K P(s)/s/{1+K P(s)/s}=K P(s)/{s+K P(s)}
�ƂȂ�܂��B
�傫��R�̃X�e�b�v�w��R/s�ɑ��čŏI�l�̒藝��K�p����Alim_(s->0) {s G(s) R/s}=P(0)/P(0) R=R�ƂȂ�܂��B
����āA�ʒu���[�v�͔�ᐧ��݂̂ł��A�C�ӂ̃X�e�b�v�w�߂ɑ��Ē���0�ɂł��邱�Ƃ�������܂��B ���疀�C�l�����ĂȂ����f���ōl���Ă�၇���Ԃ�������0�ɂȂ��
�����������Ȃ��ďo�͂��������Ȃ�Ζ��C�œ����Ȃ��Ȃ�n�_���ڕW�l�ߖT�ŏo�Ă��邮�炢�킩����
�ϕ����ł����ɑΏ�����̂ɁB��������ł������玩���ō���Ă݂� �ߎS��ID:rgMNSsya
�킩���Ă��>>674�̃��X�����킯�Ȃ�
�킩���ĂȂ��o�J �}�C�i�[���[�v�Ƃ��đ��x���[�v������Ζ��C�������Ă��ʒu�����ɐϕ����͕K�v����܂���B
���x���[�v�������ꍇ�͈ʒu�͒ʏ�PD���䂵�܂��B
���C�̕⏞�ɐϕ��⏞���K�{�Ƃ������Ƃ͖����ł��B PD����ŖڕW�l�ߖT�Œ�~������Ԃ���ǂ������0�ɂ����čs����́H
���x0�����������0����
��ፀ�ŕ������������Ė��C�͂Ƃ肠�����炻��ȏ�i�߂Ȃ����ǁH ���������������͓������Ƃ���̂�}�����鍀�Ȃ̂�
���C�œ����Ȃ��Ȃ��ĕ����c��Ƃ������ɑ��ĉ��̌��ʂ�����Ǝv���Ă�́H
���x�t�B�[�h�o�b�N�̑���ɂȂ�Ƃ��v���Ă�̂��S���Ӗ��킩���̂����H
���͂Əo�͂ƖڕW�l�̒P�ʂ͉��ōl���Ă�́H�H ���_�I�Ȑ����Ƃ��Ă͂�͂�������f�������������ɂȂ�܂��B�w�ߒl�ɑ��Ē�����0�ɂł��邩�́A�����ƃv�����g�̓`�B���̐ςɊ܂܂��s=0�̋ɂ̐��Ō��܂�܂��B
����āA�X�e�b�v�w�߂ɑ��Ă�s=0�̋�(���_��)��1�ȏ�K�v�ɂȂ�܂��B
�d�������ɐϕ���������̂́A���[�^�̓d������d���ւ̓`�B���ɐϕ���������������ł��B�v�����g�����_�ɂ������Ȃ��̂Ő���킪���_�ɂ����K�v������܂��B
���C���l���������x��������l�ł��B
�������ʒu����Ɋւ��Ă͑��x�̐ϕ����ʒu�Ȃ̂ŁA���R�Ƀv�����g�����_�ɂ�L���Ă��܂��B����Ĉʒu����푤�ɐϕ����͕s�v�ɂȂ�܂��B �d��PI-�ʒuPD����ɒu����ʒu�̔����͒����̕⏞���ړI�ł͖����ł��B
�������͈ʑ������̉��P���ړI�ł��B
��q���܂����ʂ�A�ʒu����Ɋւ��Ă̓v�����g�����_�ɂ�L���Ă���̂ŁA��ᐧ���݂̂ŃX�e�b�v�w�߂ɑ��Ē���0��B���ł��܂��B
���[�^���f����S�����C���l������1�����n�Ƃ��ĉ�͂��Ă݂ĉ������B�ȒP�ɏؖ��ł��܂��B �������f�������͌ÓT����ɂ�����T�[�{�n�̒���������ŏd�v����b�I�Ȓ藝�ł��B
��w2�N���炢�ł�郌�x���ł�����������f�������Ő���������̂�������₷���̂��ȂƎv���܂����B
���_�I�ȃo�b�N�O�����h�͒u���āA�Ӗ��G�ȉ��߂ɂ��Ă̐��������߂��Ă���̂ł��傤���H ����Ŏ��@����Ď��s����Ⴂ����
�S�����C�̒�`���ǂ��l���Ă�̂��m����x0��0�ɂȂ����H
����ŗ��_�㖳�����Ԃŕ���0�ɏo���邾��
�Ö��C��R���l�����ĂȂ����f���ʼn�͂��ĉ��̈Ӗ�������́H
���O�̂͏����I�ȌÓT����ŐÖ��C���܂�͂���Ȃ�
�P�ɖڕW�l�ߖT�̂荇����Ԃ��l������������Ȃ̂�
���Z���ł��킩��ł���
���ǂ��NJԈ�������f���ŃN�h�N�h�������Ă��Ӗ��Ȃ��� >>685
�Ȃ�ŏo�͂����C�͈ȉ���z�肵�Ă�́H
�o�J�Ȃ́H ��ᐬ���͕����������Ȃ�����ꖀ�C�͂��������͂ɂȂ鎖���킩���̂� >>693
����͂��O�̑���Ȃ����ōl����Ⴛ�������ǂ� �P���ɂȂ�̐���������������Ӗ���������� ������������`�Ȗ��C�͂��Ȃ�Ő��`�O��̌ÓT����Ő������悤�Ƃ��Ă�́H
�K�����Ă̊w�����H >>691������ƔS�����C�Ɋւ��Ă͔[������āA�Î~���C�݂̂���ɂ��Ă���Ɨ������܂��B
�Î~���C�Ɋւ��Ă͌��X�̋c�_�̖��肩�炸��Ă���悤�Ɋ����Ă܂����̂ŁA�������Ă���܂����B
�Î~���C�Ȃǂ̔���`���C�̕⏞�ɂ��Ă͐�w�Ȃ̂Œm���s���ł����A�ϕ����ɂ��⏞�͕��������Ƃ������ł��B
�O���I�u�U�[�o��FF�⏞��Ȃǂł̕⏞����ʓI�ł͂Ȃ��ł��傤���H �[������������Șb���ĂȂ��̂�
�Ȃ�ł��������b��ς����݂����Ɍ����Ă�́H
�ړI�l�ߖT�Ŗ��C�Ŏ~�܂�ƌ����Ă���̂ɑ��x���ɂ���Ƃ���
���`�ɂ��邽�߂ɓs�����������瓱�����ꂽ�悤�Ȗ��C���f����O��ɂ�����Ăǂ������v�l�Ȃ́H�H
MATLAB�������ĉ�����������C�ɂȂ��ĂȂ��Ŏ��@�𐧌䂵�ĕ�������H �A�z���Ȃ��E�E�E
�ړI�l�ߖT�Ŏ~�܂邭�炢�̖��C�͂��o�͂̃x�[�X�O�ɃZ�b�g�����ςޘb
��������
�Ȃ�ŏo�͐�Βl�[�����x�[�X�[���łȂ��Ⴂ���Ȃ��O��ł����������Ȃ��́H�� �ォ��@�\��lj����Ă���ŏo���܂��Ƃ������Ăǂ�����́H
����ɂ��O�̈������u�͏�ɖ��C�����Ȃ̂��H
����ł����l�����Ȃ��Ȃ�z���͂����� >>700����͂ǂ���痝���łȂ��o���ɂ��ƂÂ����m�������L����Ă���悤�Ɏv���܂��B
��w�̂��߂ɂ����������Ȃ��ł��傤���H
���Ɍ����̔���`���C���ʒu�̐ϕ����ŕ⏞�ł���Ƃ��������ɂ͋���������܂��B
�Q�l������_���A�̗p���Ă��門�C���f���Ȃǒm�肽���ł��B >>700
��������������
�ړI�l�ߖT�Ŏ~�܂���x�̎��̖��C�͕�������������Ⴂ����������
�����Ƃ��݂������Ă�� >>702
������ǂ�����Ă��̗͌��߂��
�������Ȃ̂��H���ׂł�����ł��ς�邾��
�����d���������^�ׂ��ʒu����ł��Ȃ��̂��H
�o�N�Ŗ��C�W������������~�܂�悤�ȃS�~����N���g���́H
����Ȃ̂��Ƃ��ƈʒu���x���K�o�K�o�ł������
���C�̉e�����ɒ[�ɏ��������ς������̂̂�
���������ʂ̐���g�ݍ���ŏo���܂��Ƃ���o���͘b�ɂȂ��ƌ����Ă邾��
>>701
�������c����̂ɑ��Đϕ������g���Ƃ����͕ʂɓ��ʂȎv�l�ł͂Ȃ�
���������`���f�������E����̂Ő��`���_�ł̈��萫�͕ۏ͂���Ȃ�
�����܂Ŏ��p�セ������Ƃ������� >>703
���߁[��P������Ă̂́A�X�^�[�g����ꔭ�������Z���ˁ[�̂��H
�邗������ �Ō�̈ʒu����̏C���Ȃ��
�g���N��������Ώ\���ł����āA���C�̂����œ����Ȃ��Ƃ��A�z�̘_���� >>704
�����Ă�Ӗ����������
�X�^�[�g���������Z���Ȃ��t�B�[�h�o�b�N�Ȃ�Ă���̂�?
����Ƃ����C�͂�O����ʓr�����A���^�C���ő��肵��
�Q�C���X�V������Č��������킯�H��t���ɂ���������� >>706
������ʒu�Y�����펞�C�����ĖړI�ʒu�܂Ŏ����Ă��ɂ�
�g���N������Ώ\���ł����āA�Ȃ�ŖړI�n�ߖT�ɂȂ�ɂ�
�g���N����ᐧ��Ŏキ�Ȃ�O��Ȃ́H
�o�J�Ȃ̂��H
��ᐧ��Ō����Ă����̂́u�ʒu���v
�o�͂����C�͈ȉ��H�������Ă�̃o�J >>706
�ʒu���䂵�Ă�̂ɉ����O���H
�S�R�킩���Ăˁ[��Ȃ��O
�ʒu���䂾���炱���A�O�������ł����Ă����ʂƂ��Ĉʒu�ɖ��f����Ă������
�ʒu����ł̓Q�C���Ƃ�ID���䂢��ˁ[����Ęb�ɑS�������t���Ă���ĂȂ����
���ꂩ��ێ��g���N���Ă킩�邩�H
���R���C�͂Ƃ����傫���͂�
�܂������O�A�ʒu����Ȃ̂ɏo�͂̓g���N�l��쓮�͂ōl���Ă��̂��H
����Ȃ�A������ƕ����������Y���܂��肾��
����ɃX�^�[�g���Ɉʒu����Ȃ�A�g���N���쓮�͂��ő�ł����ς��߂�̂��ˁH
�o�J���� >>�g���N����ᐧ��Ŏキ�Ȃ�O��Ȃ́H
������O����B�t�ɉ�����͂ɂ��Đ��䂵�Ă����Ȃ��O�́H
���Ⴂ�ŗ���Ȃ�@����� >>709
�͂͂�
�ǂ�ȃN�\���f�����悗
�ێ��͂��K�v�ȃG���x�[�^��n���h�������
�ʒu���[�����o�̓[����P���䂷��̂��H�Ԕ������낗 >>����Ȃ�A������ƕ����������Y���܂��肾��
��Ȃ킯�Ȃ�����
�����Ő���n�g������Ȃ炱��ȃo�J�Ȃ��ƌ����͂�����
���̕ӂ̈���RC�T�[�{�ł�DC���[�^�Ń��[�^���g��
��~�����܂܂̕ێ��g���N�Ȃ�ďo���Ȃ��̂ɕ��ׂ����Ă��w��ʒu���ێ����邾��
����ɑ��đ����͂�����t�B�[�h�o�b�N�������Ĉێ����Ă�
>>�ǂ�ȃN�\���f������
���œ��͂��Ă�̂������Ă��猾�������H
����̂Ɉꐶ�����Œ��g������������ >>�X�^�[�g���Ɉʒu����Ȃ�A�g���N���쓮�͂��ő�ł����ς��߂�̂��ˁH
��������H���̈ʒu�������w�肷������Ȃ�Ɍ��܂��Ă���B������O�ł���B
��`����ł��������Ȃ�ς���͖̂ڕW�l�̕������H
����킪����Ȃ��Ƃ܂ł��Ă����킯�Ȃ������ >>711
�����Ă邱�Ɩ������Ă邶���
������Ƃ����Y���Ȃ��Ă����������Ĕ��͏o����̂�
�ʒu�����Ŕ��͏o�͂ɂȂ��ĂȂ��؋����낤��
�o�J��
��g���N���f���ŁA�ʒu���ɂ�葬�xMAX�w�߂���o�͂��Ă邩��
�킸���ɂ��ꂽ�����ł���p���[�ŏC��������
�o�͂��g���N���ʒu���ɔ�Ⴕ�Ăˁ[���Ă� �Ȃ�ƂȂ��o���̌����Ƃ��邱�Ƃ͂킩����Ǖ����ł��Ƃ肷��Ǝ��E���Ȃ���
�u���b�N�}�Ŏ�������ꔭ�Ȃ̂ł� �ʒu���ɔ�Ⴓ����ׂ����͉̂����H
���ꂪ�킩���ĂȂ����疀�C�͉]�X�Ƃ��C�~�t�ȕ����Ƀn�}�邾�� �܂��A���ɂ��̔n���̌����ʂ�̕����f���ō�����Ƃ��悤
������1�ʒu�Y���N�������Ƃ��ɁAP����Ŗ��C�͂��ア�o�͂����o�Ȃ�����
���X�ƈʒu�[���Ɏ����Ă����Ȃ����Ƃ��邗
�ŁH
���̔n����ID����lj����Ăǂ����悤���ẮH��
���b�����҂��Ă���I�����\���ȂقǑ傫���Ȃ��āA���C�͂������Ă����́H
����œ����n�߂���ʒu�[���̎��A�u����I�����[���ɂȂ��Ă����́H��
�d���ו��̎��͂܂�I�����ǂ�����Ē�������́H����Ɏ��ԑ҂�����́H��
�A�z�Ȍ��ʂɂ����Ȃ��
�܂�����ł͂��肦�Ȃ������f���������o���ăA�z�_����Ă�̂́A���̔n���̕������Ă̂��킩�邾�낤 >>714
�������ˁ[��
�ʒu��0�Ńg���N0�ɂȂ鐧��킶�ᕗ�������Ă������Ƃ������A�z�Ȏ咣�Ɏ���Ŕ��_���Ă�
�|�e���V�����[�^�ňʒu���������炸�ADC���[�^�Ŏ��g�ɒ�~�ێ��̖͂�������RC�T�[�{��
�O�͂ɑ��ĂȂ�ŏu�����Ĉʒu��ێ��ł���Ǝv���Ă�
>>��g���N���f���ŁA�ʒu���ɂ�葬�xMAX�w�߂���o�͂��Ă邩��
�N���������ăR��
���Ǔ��͉͂��𐧌䂵�Ă�
�ʒu�����傫���Ȃ�Ɖ���傫�����Đ��䂵�Ă����Ȃ́H >>717
���͂����ł��ɂȂ�̂ɂ��܂ł��҂悤�ȃQ�C���ɂ���킯�Ȃ������
�z�肳���d�ʂ͈̔͂ł����Ɠ����Q�C���ɍ��킹�邾���ł���
�����Ԃ��҂Ƃ��������Ă�́H P����ID�C�������炢�����[�ł����ł��邱�Ƃ�O��ɂ��Ă�낤�ȁ�DPZpZKgX
���ۂ���ŊԂɍ����̂��������ˁARC�T�[�{�Ƃ��قƂ�ǂ����B
�K�x�ɃI�[�o�[�V���[�g���Ă䂷���āA�Î~���C���͌����Ȃ��Ȃ����Ⴄ�B �����ǁAI�������p�r����������A�ꍇ�ɂ��㩁B I�����œ��͂��ł����Ȃ�̂ɉ����Ԃ��҂��ăQ�C�����A�z�݂����ɏ������������ �ʒu���ߕ����L�����Ă��܂��Ȃ�Ƃ��Ȃ�
���̐́APLC�Ƀ��_�[�ňʒu�������������ăC���o�[�^���T�[�{���C�N�Ɏg�����Ƃ��Ēɂ��ڂɂ��������Ƃ��v���o������E�E�E �Î~���C�Ƃ������������̂�
�Q�C���̑傫��I����ʼn��Ƃ��Ȃ�Ǝv���Ă�o�J
�ʒu���ʼn�����o�͂�����ׂ����������܂��ɗ����ł��ĂȂ��Ƃ͂�
�Î~���C�͂��C�ɂ��Ă鎞�_�ő�I�O�ꂾ���ċC�Â��� ��̃}�E���g�Ƃ�ɂ��M�S�Ȃ̂���̐����Ȃ��o�J�o�J�����Ă邾���̂������˃R�R
�܂��ςȂ̂���C����t���Ă邾���Ȃ낤���� �Î~���C���Ă܂�����̂��Ƃ������Ă�̂��ȁH
���Ƃ�����ϕ����K�v���Ă����͕̂��ʂɃC���[�W�ł�����ǂ��������b�ł͂Ȃ��́H >>726
���������b��"����"�ɒm���z�������ɂ͌��\����̂��� ���������Ă�z�̓������ނȂ̂͂悭�킩���Ă� �����������ړI�l�ߖT�Ŗ��C�Ŏ~�܂�
���Ă̂��Ԕ���
�ړI�n�ɋ߂Â��قǃg���N���Ƃ����f���Ȃ�ăo�J�����l���Ȃ�
��g���N�܂��͒�o�͂̑��x�w�߃��f�����낊�� �����Ƃ�����߂Â��Ă���
���܂��Ɏ~�܂낤�Ƃ���Ƃ��ɕK�v�Ȃ̂́A�g���N���o�����ƂłȂ�
��u���[�L�Ō������ꂽ�K�ȑ��x
������~���K�v�ȃ��f���ɁA�ʒu�����ɂ��g���N��쓮�͐������
�������� �܂����܂茈�܂����J��Ԃ��^�����镪�ɂ͂���ł���Ƃ��Ηǂ���Ȃ��ł����� �ςȂ�������Ƃ��L���p�͂Ȃ����� �Ƃ������Ђ���������̂��o�Ă���̂��p�^�[���ɓ���̂��� �������̈ʒu�̎w�ߒl�X�V�ɂ�鐧���Point To Point�̈ʒu�v���t�@�C�������ɂ�鐧�䂪��������ɂȂ��Ă�C�������
�O�҂͕�����Ȃ��ʒu���䂾���nj�҂͑��x���䂾���ł�������x�������邩���₱������ �n�C�T�C�h�h���C�o�̃u�[�g�X�g���b�v��H�ɂ��āA�C���o�[�^��~���ă��[�^�t���[���������畜�A����ꍇ�ɏ����[�d�����邩�̔��f�͎c���d�������Ԍo�߂Ō��ς̂ł��傤���H
�������ŏ[�d���Ă�����A���[�^���͊����ɂ���ď�������ɂȂ�H�̂��ߓd���G���[�ɂȂ��Ă��܂��܂����B >>738
�ق��̐l�͒m��Ȃ����A���Ԍo�߂Ō��ς����Ă���
���������ۂɂ́A���[�^�[��]���ɒu��������
��]���Ƀ��[�T�C�h�̑f�q���I������ƁA�n�C�T�C�h�̃u�[�g�R���f���T�[���[�d�����̂Ɠ����ɁA
�N�d���ɂ��d�����A���[�^�[�R�C�����I�������f�q�A�����/�܂��́A�f�q�ƕ���̃_�C�I�[�h��ʂ��ė����
���̌ネ�[�T�C�h�̑f�q���I�t�����u�ԁA�n�C�T�C�h�̑f�q�ƕ���̃_�C�I�[�h��ʂ��āA�d�����d���ɗ��ꍞ��
�d�����ɋz���\�͂��Ȃ��ƁA�d���d�����㏸���A�ߓd���G���[�̐ݒ肪����Έ����|����
�ߓd���������邽�߂ɂ́A���̂R�قǂ�������
�E�d�����ɋz���\�͂���������
�E���[�T�C�h�f�q���I�����鎞�Ԃ��ɗ͒Z�����āA���[�^�[�R�C���̗U���d���������������ɓd���ɖ߂�
�E���[�^�[�p�x�܂��͑��[�q�d�������āA����2���̃_�C�I�[�h�ɐ��̋N�d�����o�Ă���^�C�~���O�ŁA�ق���1���̃��[�T�C�h�f�q���I���ɂ���
�킩�邩�ȁH >>739
�d���ɕԂ��Ƃ����̂̓o�C�|�[���d�����g���Ƃ������Ƃł��傤��
>>����2���̃_�C�I�[�h�ɐ��̋N�d�����o�Ă���^�C�~���O�ŁA�ق���1���̃��[�T�C�h�f�q���I���ɂ���
�����^�C�~���O�̑O��W���悭�킩��܂���;; >>741
���d���ɕԂ��Ƃ����̂̓o�C�|�[���d�����g���Ƃ������Ƃł��傤��
�Ⴆ�o�C�|�[���d��
�ق��ɂ́A�[�d�\�ȃo�b�e���[�̕���ڑ���A��d���d���Ƃ����菭���d���ݒ�l����������CV�d�q���ב��u�Ƃ̕���ڑ��Ȃ�
�������^�C�~���O�̑O��W���悭�킩��܂���;;
�f�q�͂��Ԃ�FET�ŁA�����Ƀ{�f�B�_�C�I�[�h�������Ă���
���[�T�C�h��FET��1�����I���ɂ��āA����Ƀ��[�^�[��3���N�d������������Ƃ��̓d���̗���������Ă݂�
�I������FET�́A�\�[�X�ƃh���C���͂ǂ�������ɂ��d���͗���邪�A
�I�t��FET�̓{�f�B�_�C�I�[�h�ɂ���Ĉ���ɂ�������Ȃ��AN-ch�Ȃ�\�[�X����h���C���̕�������
�d��������Ă��Ȃ��Ƃ��ɂ́A�R�C���̃C���_�N�^���X�ɂ�鏸���`���b�p�[��p�͋N����Ȃ��� �悭�킩��ǃ_�C�i�~�b�N�u���[�L�̉�H�ł��lj����Ă��������t���[�������Ԃ�Z������Ƃ��̓_���Ȃ́H ���[�^�t���[�������ď����Ă��邩��BLDC��z�����Ă������ǁA
�u���V�t��DC���[�^�[��H�u���b�W�쓮�Ȃ̂��ȁH�@��������^�C�~���O�͑I�ׂȂ��� �s�̂̃T�[�{���[�^���ĂȂ�œd���d���ɂ���Č^�������Ă�낤��
�A���v���͂Ƃ��������[�^�͓d���d���ɂ���čō���]�����ς�邾�������瓯���^���œd���ɂ���ăX�y�b�N���������邾���ł����������Ďv�� ��莩���ԃ��[�J�[�̖��O�����������ݔ�������]�E���Ă����o�J
�J�^���O�̓ǂݕ�����킩�炸400V���[�^�[��z���������
�ԕi���s������Ēp�N�����Ԕ����������Ȃ�
�{�l�͒p�̎��o�Ȃ�����ǂ��ɂ��Ȃ�� ���ł��Ă��肪���������炱�ƂȂ邹�������Ђ悤 >>745
Y�Ђ��ƒ�i3000rpm�A�Z���Ԓ�i5000rpm�������悤�ɂ��Ă��
��{�A���v�ƃZ�b�g�œ���100/200V�œ����������悤�ɏ������Ă��� 300V�����ɁA�\���I�Ȑ≏�����̋K��ɍ������݂���B �����Ȃ�
�C�O�̃T�[�{��100v�`400v�܂œ����^���ʼn�]���ƃg���N�����Ⴄ�\�L��������
���ƃC���_�N�^���X�E��R�E�U�N�d���萔��������ĂāA���Ƃ͎��ɂ̃I�t�Z�b�g�����킩��ΓK���ȃh���C�o�ł������ȕ��͋C ��L�̕\�ɂ���
�ݒu�J�e�S���V(��Ƀ��[�^)��
300V�����ł͉ߓn�ߓd��4000V�̐v
300V�ȏ�ł͉ߓn�ߓd��6000V�̐v
���K�v
�܂��A���ʋ����A�≏�������e�J�e�S���ɂ���ċK�肪�قȂ� �����ƍŏ�����300v�ȏ�̑ψ��v�ɂ��Ƃ����������Ɏv������ǁE�E�E ������
�ł��v�̃R�X�g���������ł��Ȃ����A200V��400V�œ������ꂪ�o���Ȃ��������b�g������ ���[��A�����Ă邱�Ƃ͗����ł�����NJǗ��������^���������ōςރ����b�g�͑傫���̂ł́H�Ǝv�����Ⴄ��
�܂����������Ŕ���Ȃ�S�^����400v�Őv����̂͊m���ɃR�X�g�I�Ɋ���ɍ���Ȃ������� �≏����ƘR��傫���Ȃ��ē������������� ���[�^�d����d���v���[�u(max20A)�ƃI�V���Ŕg�`���j�^����ƁA�d�����������ƃm�C�Y���������Ǒ����̂����H�d�������Ă����Ə��X�ɔg�`�������g�ɂȂ�
���[�^�ɂ���Ă�100mA���x���琳���g��������ꍇ������ ���̃X���ł܂Ƃ��ȃA�h�o�C�X���߂悤�Ƃ��Ă����ʂ�����w �������[�^�[�ł����͂Ƃ��Ă̌����Ɣ��d��Ƃ��Ă̌�����
�����l�ł��S���Ⴄ�Ǝv���̂ł���
���ꂪ�ڂ���������Ă��鏑�Г��L������ĉ����� ���ׂĂ�l���������Ȃ����瓯���l�ȃ��m
�X�s�[�J�[��\�[���[�p�l�����Ⴄ�炵������
���[�^�[�������ɒ��ׂ�Δ��d�Ɠd���@�Ƃł͊m���Ɍ����Ⴄ�͂� ���j�A���[�^��tn�������Ăǂ�����Ē��ׂĂ��ł�����
�ō������Ɩ��f����Ɛ������ł������� ���ʂ̃��[�^�Ȃ�ǂ������ł����H
�e��Ƃő�����@�قȂ�܂���H �C���_�N�^���X���傫�����[�^�͍���]�����ɂ����炵���̂ł����A��ȗ��R�͉��ł��傤��
�P���ɃC���_�N�^���X�ɂ��d�����u���ɗ�������߁H
�C���_�N�^���X��=�R�C������������=�t�N�d���萔���傫���Ȃ邽�ߑ������Ȃ��H ���ʂɋt�N�d���������Ȃ�̂������ł�
�Ƃ͂����C���_�N�^���X���Ⴂ���[�^�͋t�ɒ�R�������X���ɂ���̂Ŏ�ߊE���ɍH�v���K�v�������肵�āA����͂���ō���]���h������ �C���_�N�^���X�ƒ�R�̔䂪�d�v �C���_�N�^���X�����\mH�����Ă��U�N�d�����Ⴏ��Ζ��Ȃ�10,000rpm�ȏ��B����ɒ�R��������x�傫����A�d���ߓn���������Ȃ� ���[�^�̃`���[�j���O���Č����ƒ萔�`���[�j���O�ƃQ�C���`���[�j���O����������ɂȂ�
��������C���o�[�^���O�҂ŃT�[�{����҂݂����ȕ������H >>767
���[�^�[�̉�]���E�Ǝ��ɂ̊W�����Ă邾���ł́H
�X�e�[�^�[�������ɂȂ��������ŁA
��{�͕��ʂ̃��[�^�[�ƕς��Ȃ� �����^��������]���\�������̂���ς��Ă��Ƃł́H ��]�n�Ȃ�R���ɔC�ӂ̃g���N������������������NJm���ɒ����n�͂ǂ������ ������ƃ��j�A���[�^�[�ɂ��Ē��ׂ�
���j�A���[�^�[���Č����Ă�̂ɉ�]����Ƃ�
�킯�킩��ƍl���Ă���
���ʂɃR�C���݂����ɂȂ��Ă��
���͂��|�����ň��������Ă��
��]���͉�]���x�Ƃ���������
�~���~��]����60=�����I�ȉ^���̕b��
�g���N�͒����^���Ƃ̔�r��������x�~���ʂƓ��ꂾ����o�邶���H
���̑��肪������Ă��ƁH ���j�A���[�^�H���Ⴀ�����́H���ă}�W�ŕ�����邱�Ƃ����܂ɂ��� >>778
��]�̂悤�Ɍp���I�ɂ͉^�]�ł��Ȃ����琔(����)�̕��ς��o���ɂ�������ł͂Ȃ�����
������邮����Ԃōō����x�L�^�����Ă��̂�
�������É��ԂŌv�����Ȃ���Ȃ�Ȃ�
�݂����� >>780
�Ȃ�A�~������������Ȃ�(���\) ���j�A���Đݒu�̐��x�Ő��\�����Ȃ�ς���Ă��邩�炷�����C�����̂�� �����d���̃K�o�K�o�Ȏd�g�݂�m���Ă��
���͂��O���ɕ��o����d�g�݂̌����̈����������邩��
���j�A�̑@�ׂ����������Ă����() �ʒu�������Ă邯�ǁA�ڕW�ʒu���B���ɑ��x���c�邱�Ƃ����\����B�}�C�i�[���[�v�̑��x����Q�C�������������̂��ȁB
17bit����\��10�p���X���炢�I�[�o�[����B ����@���甲�����O�����[�^�[�ɓ���������@���甲�����R���f���T���q��
�R���Z���g�Ɍq���ƈꉞ��镨�̃M�B�[�ƂƂ�ł��Ȃ���������̂ł���
�ǂ��������������l�����܂���
�E�C���o�[�^�[�Ő��䂳��镨��AC100V���͍l������ĂȂ�
�E�����Ȃ�������̉������̃x�A�����O���j�����Ă���̕����I�ȑ���
�������v�������Ԃ̂͂��̓�ʂȂ̂ł����A���|�I��҂ł����� ������ʼnĂ����ɂЂ������芴�͖����̂ŁA�d�C�I�ȉ\���������ɂ����H ���O�̂Ȃ���������
�@�킲�Ƃ̒��������Ă��Ȃ� ��������}���f�[!!������|�Ɠd���[�J�[! �� �Ⴆ�W�����N�i�̃��[�^�[�����Ƃ��āA�^�Ԃ����������Ă��Ȃ��Ƃ��āA
AC���[�^�[�Ȃ̂�DC���[�^�[�Ȃ̂��A���邢�́A����ȊO�̃��[�^�[�Ȃ̂�
����������Ȃ��Ƃ��āA�ǂ������̃��[�^�[���܂����H �炵�Ă悭�ώ@������������킩�邼 ��@�Ƃ����C���AC���[�^�[���g���ă��R�[�h�v���[���[��肽����ł����A
����33 1/3��45��]�̒ᑬ�ʼn܂����H �Z�p�I�ɕs�\�ł͂Ȃ������
����g������ɏo���C���o�[�^���K�v
�v���[���[�ɕK�v�ȃp���[���킩������ȃ��[�^�[�ł͓���� �j���悹�邾���ʼn�]����������
�Ƃ������U�����[�^�ł͈��肵�Ȃ� >>793
>>794
�����Ȃ�ł����B
AC���[�^�[���̃_�C���N�g�h���C�u
�v���[���[���Ė����Ȃ�ł����H >>796
�Ȃ{���]�|���G���ł��Ȃ� >>795
�_�C���N�g�h���C�u��
���Ƃ��Ƃ�������郂�[�^�[�i���Ƀ��[�^�[�j
>>796 �̂悤�ȃT�[�{����
�Ŏ������Ă��� https://plaza.rakuten.co.jp/cynqa2/diary/201708280000/
���̃T�C���X�^�������P��AC���[�^�[�Ɏg�����ꍇ�A�g���N�̋��ゾ���ʼn�]���x�͕ς�炸�A
��]���x�����������߂��ꍇ�͐G���������ł����~�܂�̂��Ǝv������ł����A
���ƒᑬ�ɂȂ��Ă��g���N�����Ă悭������Ȃ��c ��낤�Ƃ��Ă��邱�Ƃ́A�ڐV�������a�V�ł��Ȃ�
�����̉����ł�
�ǂ����Ă����̃��[�^�[���Ƃ������Ȃ�
�M�A�{�b�N�X��v�[���[�x���g�Ō���
���ۂ̃^�[���e�[�u���ł������ł� ���Ȃ݂ɁA�x���g�|���̒������i��
�x���g�̑f�ނł������m���ɕω�����Ƃ̂��Ƃł�
�S���x���g�A�P�u���[���A����...
�����ɂ���������ނŁA���Ⴀ�ډB���œ��ĂĂ݂��Ă�
�Ƃ����Ă��Ȃ������H���Ă���܂���ł��� (���������C�i�[�V���ł��̉e�����������߂̒��d�ʋ��^�[���e�[�u������Ȃ��̂���....) RS-380PH��
9V2A �ėp AC�A�_�v�^�[ �X�C�b�`���O�������艻�d�� �v���O�O�a5.5mm
https://www.amazon.co.jp/dp/B06XFL43YR/
�̃v���O�藎�Ƃ��ă��[�^�[�ɒ��łȂ��Ă������Ė������̂ł��H ���Ƃ��ƃv���O�t�ł��̑g�ݍ����Ŏg���Ă��Ȃ瓯�����\�͏o��
��ʓI�ɂ͓d���̔\�͕s��
��肠�邩�Ȃ����͎g�r�ɂ�� �Â��~�L�T�[(�������)���甲����AC���[�^�[���Ă݂���10�b���ŃA�`�A�`�ɂȂ��ċ������c
�m���ɂ���Ȓ����ԉ��ł͖����Ǝv�����ǁA����Ȃ�ő��v�Ȃ̂�
�����[�^�[�̃��[�^�[�Ɏg�������������ǁA����Ȃ����A�`�A�`�ɂȂ��~�߂������ǂ��̂��� �����炭�P�����������q�d���@�ƌ����^�C�v�Œ[�q��10���Ȃ̂ł����A���[�^�[�̏ꍇ
10A�����ƌ������ł͖�����ł���ˁH >>808
�C���_�N�^���X�����邩��n���d���͂����܂ő傫���Ȃ�
�ϑ����[�^�Ȃ̂Ŗ����ׂ��Ƃ��Ȃ荂��]�ɂȂ�
�i�|���@���l�܂�Ɖ�]���オ��̂Ɠ��������j >>806
�Â��~�L�T�[�Ȃ�t�@�����t���Ă��ċ�������ɂȂ��ĂȂ� �����ׂ�����߉�]�œS����������łȂ��H
�V�[�����Ă���@�B�����l�����邯�� ��]������Ȃ����̂���
�܂��~�L�T�[�悤��������]�ɂ��Ă邩 �X�e�[�^�[�H���̊O���͑債�ĔM���Ȃ��̂ɃV���t�g���G�ꂽ�r�[�������Ƌ����M���ł���
�R�C���ł͖����x�A�����O�����M���Ă���ł����� https://i.imgur.com/8GePWmV.jpg
���[�^�[�S�i
3D�v�����^�ŃP�[�X��낤���Ǝv���Ă���ł����A�V���t�g�ƈꏏ�ɗ��e�̃l�W���A�`�A�`�������̂�
PLA���Ƃ����ƌ����Ԃɕό`���Ă��܂��\�� >>786
100V�̐���@�ŎO�����[�^�[�Ȃ�
���R�C���o�[�^�[�쓮
�����܂ł��Ȃ����� �_�C�I�[�h��{�͂���Ŕ��g�����̖����ɂ��Ă��Ώo�͂������ɂȂ邵
10V���x�̒����ł���]���邩�璼���Ŏ������Ă݂��� �U�����[�^�ŐÎ~�g���N�o���Ƃ��̓d���l���T�[�{���[�^�Ɣ�ׂč����͉̂��łȂ́H
�T�[�{���[�^�Ŗ����ׂ���1%������Ȃ��̂ɗU�����[�^����50%���炢����Ă� RC�T�[�{�݂����ȍ\���Ȃ�d�������Ȃ��Ă��M�A�ł��Ȃ�傫�ȐÎ~�g���N�҂��邩�炶��Ȃ����H >>818
�o�����X�t�g���N�ŐÎ~��
���Ď~�ߓI�Ȓ�~ >>821
�T�[�{���[�^�ł��Œ�q����������̂ɓd���𗬂��͓̂������Ǝv�����ǁA
���̓d���l���U�����[�^�̂ق������ΓI�ɍ������R�𗝉�������
���炭��]�q�̈Ⴂ�ɂ����̂��Ǝv�����ǁE�E�E ���������T�[�{���[�^�ƗU�����[�^����r�ΏۂɂȂ�Ȃ�����킩��Ȃ�
��~�ʂƉݕ����ׂ���ǂ������y���H���ĕ����Ă�悤�Ȃ��� ac�T�[�{�Ȃ烂�[�^�[�͎��Εt�������@������X�e�[�^�ɓd�������悢���A�U���@�̓��[�^�[�ɂ��d���𗬂��Ȃ��ƃg���N���o���Ȃ� >>818
�T�[�{���[�^�[�ɂ��U�����[�^�[�ɂ��F�X����̂ň�T�Ɍ����Ȃ���
��ʓI�ɗU�����[�^�[�葬��]���ȊO�̓��[�^�[�Ǝ��E�Ƃ̂��ׂ肪�傫��
��~��Ԃ���g���N��ɂ͂���Ȃ�̓d�����K�v���Ƃ������Ƃł�
�����͍����\�C���o�[�^�[�Ƃ̑g�ݍ��킹�ŏ\�����Ă��邪
�}��~�}�����̓T�[�{���[�^�[�ɂ͂��Ȃ�Ȃ�
�T�[�{�[���[�^�[�͒�~��Ԃ���ł����߂ǂ���ɓ����Ȃ���Ȃ�Ȃ��̂�
���E�ƃ��[�^�[�̂��ׂ�͖����ɉz�������Ƃ͂Ȃ�
��~��Ԃ���ł����E�̂��ׂ肪������Β�d���Ńg���N��������Ƃ����킯�ł� https://www.mikipulley.co.jp/JP/Products/SpeedChangersAndReducers/about.html
���[�^�[���̂̎��ł͖����̂ł����A�R���V���}�����̏��^�T�[�{�͂قڑS�ĕ��M�A�̌����@��
���ŃE�H�[���M�A�͎g���Ȃ��낤�Ƃ������Ă݂�ƁA�����������Ă̂��S�ĂȂ�ł�����
�����b�g������ƃT�[�{�g�ݍ��킹���T�[�{���{�ȂE�H�[���M�A�̕��������Ă����� >>826
�Z���t���b�N�͎g���ɂ�����
���ٓ_������ �����Ă�������
���߂�arduino����T�[�{�𐧌䂵�悤�Ǝv���Ă�̂ł���
��ɕt���鑤�̃R�l�N�^�[���ĉ����g����ł���?
Futaba���ċK�i�̃R�l�N�^�����Ă郂�[�^�[�����Ǝv���Ă�̂ł���
2.5mm�̃w�b�_�s�����u���b�h�{�[�h�ɑ}���Ƃ肠�����g�����肵�܂�?
�c�������Ă����肷��݂����ł����A�������������Ƃ����R�l�N�^���Ăǂ�������ł��傤
�T�[�{�͏H���ň����̂������������Ă݂����ł� �������ራ�����ǂ������ɏ��S�҂�����
�����ŃT�[�{��I��Ŏ����Ŕz�����Ď����ŃX�P�b�`�����ĂȂ�Ă̂͂��̒m���ʂ��Ƃ܂��g���u���ċl��
�������ĕ��i����ڑ��A�X�P�b�`�܂ŏڂ���������Ă�l�����āA�܂������������i�E��H�E�v���O�����œ������̖ڎw�����ق��������� �킩��܂���
���[�^�[�Ɏ���o���͎̂~�߂܂� ���W�R���ŗV�Ԏq�͌����Ă��܂����̂��̂�
�₵�����肾�� �t�ɐ̂͂����Ƃ����^�~���Ƃ��̃��W�R���͍��l�̉��������ǁA���͂�����ꡂ��Ɉ���
���i�Œ��ؐ��̃h���[���������Ă��܂���� ���������Ώ��w�����w���̎���
�i�p��犪���A�ɐ����
���_���Ă����Ȃ�ƂȂ����o�ň����Ă���
���m�ł͂Ȃ��Ƃ��Ԉ���Ă����Ȃ��Ƃ��������� �M���w�b�h�Ƒg�Ŏg�����^�U�����[�^�[
�I���G���^�����[�^�[�ƃp�i�\�j�b�N
�ǂ����������̂���
���Ȃ��Ƃ��s��V�F�A�̓I���G���^�����[�^�[���낤�� �������I���G���^���̕����Z�p�������ǂ������o�������� �U�����[�^���ă��[�^�Ƀt�@���t���ĂĂ���Ŏ��ȗ�p���邯�ǁA�T�[�{���[�^���Ă��������t�@���t���ĂȂ��ł����
�����̗L�������ł���Ȃɕ��M�ς���ł����H �U�����[�^�[�̓g���N100%�ŘA���^�]�ł���悤�ɐv����Ă邩����M���K�v�ɂȂ�
�T�[�{�͗p�r�ɂ�肯�肾����K�v�Ȃ玩���ŗ�p����ƂȂ� �T�[�{�����ʂ̓g���N100%�ŘA���^�]�ł��邼
�����b�N���ꂽ��ʂ��� �����b�N�ɂ��ߓd���͍ō��ɃG�R �E�H�[���M�A���ƃZ���t���b�N��������Ƀ��[�^�[�V���t�g����]��������Ȃ��O��Ɉ��������āA
�E�H�[���M�A�����ɍ���ĂȂ����[�^�[���ƃx�A�����O�Ƃ���ɂ߂��肷��̂��� �����������\���d�l���ɋL�ڂ��Ă邩�� �~�c�~�ƃI���G���^�����[�^�[�̎d�l�����߂Ă݂����ǂ�����ۂ����ڌ�������Ȃ��Ȃ� ���@�~�c�~�̎d�l���̎g�p��̒��ӂ̏���
���[�^�̉�]���ɑ��镉��
���[�^�쓮���ɁA�V���t�g�ɉ��L�̂悤�ȑ傫�ȉd��������ꍇ�A���[�^�����Ɉ��e�����y�ڂ��ꍇ������܂��B
���g�p�����̂��ƂŎ��O�ɂ��m�F�̏�A�@�\��ł̑Ή����l����悤���肢�v���܂��B
1)�E�H�[���M�A�����̓t�@�����ɂ��X���X�g�d���傫����
2)�ΐS�J�����ɂ��A���W�A���d���傫����
�Ƃ����� �����Ŏ������������̂� �E�H�[���M���ŋ쓮�o�����Ⴄ���Ă��Ƃ�
�Z���t���b�N�̂��߂̗͂����̋쓮�͕�����Α���邶���
�쓮���ɃX���X�g�d�ς��Ă���A���b�N���ɑς����Ȃ��킯�������� �����������[�^�[���ɃE�H�[��������NG���B
�J�v���[���܂��ăX���X�g�x�A�����O������̂��������B �J�v���[���ĂȂƎv������J�b�v�����O�̂��Ƃ�
�C���V�����b�N�ƃP�[�u���^�C�݂����Ȋ������� >>847�̃o�J�͖������Ă悢
���[�^�[������o�͂���g���N��X���X�g�d�ɑς����Ȃ��Ȃǂ��肦�炾
�E�H�[���M����t�@����
����Ŕ�������X���X�g�d�ɑς���ꂸ�j��Ɏ��邩���Ă� ���[�^�[�ɂ��Ƃ���
https://www.mabuchi-motor.co.jp/product/knowledge/instructions/usage.html
���ɃE�H�[���ł̑傫�ȃX���X�g�d�̂�����ꍇ�͋@�\��Ŏ��l���ĉ������B >>847��>>847���ɘ_����
�y���ׂŃ��[�^�[���ɃE�H�[���������Ă�ꍇ�����邵
�X���X�g�d�������X���X�g��������ꍇ�����邵 �����f�����������܂���
>>847��>>849���ɒ��������Ă��������܂� �ߓx�I�ȃo�b�N�t�H�[�X���|���鎞�ɂǂ������邩�H
���x�Ŋ撣��A�J�b�v�����O�œ������A�v�̍l�������悾��
�����ȃ��[�^�[�������Ȃ�����A�J�b�v�����O���q���[�Y�ɂ��邱�Ƃ������蓾�� �����l�ȕ����Ǝv���~�Ճh���C�u�ɓ����Ă�X�e�b�s���O���[�^�[+����l�W�̃��j�A�A�N�`���G�[�^��
����l�W�̐�[�Ƀx�A�����O�̃{�[�����t���Ă����ǁA���������Ɏ��̗������{�[���ŋ��ݍ���ł��܂��Ηǂ��̂��� �Ƃ��������[�^�������Ɛv�̎��R�x�������邵�����e�i���X�����g��������������J�b�v�����O�g����
�ł������v�����ǃJ�b�v�����O������ 1���C��5000�~���炢���邵 >>856
�����I�t�Ȃ�J�b�v�����O�g�������悢���
�ʎY�i�ł������DR�ŃR�X�g��������ɃL������ >>857
���[�^�[�����͂����Ƃ����Ƃ��ɏC�����Â炭�R�X�g�A�b�v�ɂȂ��邩��
��߂�o�J�ƃR�X�g��������Ɍ����Ă�� ��������
���ʂɌ����@�t�����[�^�[�ł��� �n�[���j�J�b�N�h���C�u�������� �u���[�L�t�����[�^���Ă₽�獂���Ȃ��H
���ʂ̃��[�^��2�{�ȏサ���� >>862
���[�^�[�t�̃u���[�L�ƍl���Ă݂� >>861
���Ԃ����ɁA�悭����ł���܂��B �Љ�̎��Ԃ��Č������ǂ��A���Ԃ��Ă��ƍ������i�Ȃ̂�� �M�A�̓^�~���̃L�b�g�ŕ�����
�u���h�[�U�[�����
�ߏ��̍H�ꌻ��Ɏ������ɂ�����
���̃u���h�[�U�[�G���W���̓A�����J�����
�������Ԃ��ꂽ
�����ŗV��ł��獻����ʼn�ꂽ
����� �O���𗬃��[�^�[�̃c�i�M�}������ƁA�C���o�[�^�[�����u v w�������̐ڑ��̐}�ƁAu v w���Ɛڒn�����ڑ��̐}�������ł����A���[�^�[�̐ڒn���̗L���͂ǂ̂悤�ȗ��R�ł��傤���H �ڒn���̗L���Ȃ�ċC�����낗
�Œ�l�W�ŃA�[�X����A����ȃ��[�^�[�ŃA�[�X�Ȃ�ċC�ɂ���ȁA����σA�[�X��p�[�q�������ق���������������ȁI�E�E�E ��Ԃ̈Ⴂ�͎��̎��ɐl�����ɈՂ����ǂ������ˁB
�O���l�����ł����ԓd���𐧌䂵�Ă��邾���⑊�d�������𐧌䂵�Ă���ꍇ�����邵���ԓd���Ƒ��d�������킹��12����������Ă���ꍇ�����邩�猈�ߑł��͏o���Ȃ��B ����ł���
�����d����������̂ɁA�傫�����[�^�[1�Ə��������[�^�[��2�i�ȏ�H�j�ł͂ǂ��炪�ȃG�l�ɂȂ�̂ł����H ���_�͒m��Ȃ�
�����I�ɂ̓J�^���O����Ƒ傫�����[�^�[�̕��������������B�������̕�������
https://www.toshiba-tips.co.jp/download/catalog/mot/cata_pgm250_mot.pdf
����������̓��[�^�[�P�̂ł̘b
�d�C�����ԂȂLj�̃��[�^�[���g���ē�։ƂȂ�Ɠ��͓`�B���K�v�ɂȂ邩�炻�̑�����������\��������
�������[�^�[�̂����ċ쓮�����ق��������͂�����������Ȃ��i�C���z�C�[�����[�^�[�j >>872
�͎d���Ȃ�傫�����[�^�[�̕����L���Ȃ͕̂�������ǁA�P���ɉ�]�������̔�r�Ȃ犣�d�r�œ����l�ȏ��^���[�^��ȏ�{�M�A�Ƃǂ���������d�͂����Ȃ��̂���������Ȃ��āB >>873
�M�A�Ƃ����܂߂��V�X�e���S�̂̌����̘b�ɂȂ��
�ǂ����������łǂ��łǂ��������X���������邩��
����Ȃ��ƌ������Z�o�ł��Ȃ��B
�܂�A��T�ɂǂ��炪�ǂ��Ƃ͒�܂�Ȃ���B �����̃��[�^�[�ƃM�A�ŒP���ɉ�]��������r����A
���Ăǂ������̂�z�����Ă�̂��S�R�킩���
��]����100�{�ɂȂ�M�A�{�b�N�X�̓��͂ɑ傫�ȃM�A�����āA
���̎��͂Ƀ��[�^�[�����������ׂ�̂���
����ł����ǂ͎͗d������� >>875
�Ⴆ�Ƃ��ēK�����ǂ����͕�����Ȃ����ǁA�Ⴆ�ΐ�@�ł��ˁB
��{��1���[�^�[�����Ǔd�C��H��Ȃ����^���[�^�[���g���A�����d���ł��d�C�̏���ʂ�Ⴍ�o����̂ł͖����̂��ȁH�Ǝv���āB ��]����r����d����r�ɖ߂����Ȃ�
���[�^�[�������Ə����ȃu���[�h�����Ȃ����畗�����������Ȃ�
�������ׂĂ����敗�ɂ����Ȃ�Ȃ�����
���ɂ���ŏȃG�l�ł���Ȃ�t�@��������������ׂ���@����������Ă�ł��� >>876
�}���ڂ���ꖳ�����犿���ŏ����Ƃ�����������
�H�[��
��
��
�H�[�M
��
�������[�^�[�E�M���M�A >>877
����̓t�@���̐��\���܂�r�ɂȂ��Ă� >>879
�͂��������Ȃ��Ⴂ���Ȃ�����t�@���Ȃ莕�ԂȂ�̐��\�܂܂Ȃ��Ɣ�r�ł��Ȃ��� >>877
������A�P���[�^�[�ł͖����ĕ������[�^�[�ŃM�A��������H�ƌ����b�B �H�[���[���@�@���Ƃǂ����낤�H �n�[�n�[���[���[
�킯�킩���
100W�̃��[�^�[1��
10W�̃��[�^�[10��
100W�̎d���Ȃ瓖�R100W1���ȃG�l
�͂��I�� >>883
���̒�R����C�̒�R�������A��@�̉H�͂��̔�͂ȃX�^�[�����O�G���W���ł������������o����̂����B
�X�^�[�����O�G���W���̐�@�͎��ۂɗL�������B �H�[���[��
�݂����ȍ\�����ƒ��Ԃ̃��[�^�[���̂ɃG�l���M�[�H�����炻���ő������N����
�ǂ����̂��m��Ȃ����Ǖ������[�^�[�ŃM�A���Ȃ�Ă̂�����
�K���ǂ����ő������o�邩��@�H-���@�̌������邱�Ƃ͂��蓾�Ȃ�
��@�̉H�����ǂ�ȂɌy���܂킹�Ă����� ��]�����قȂ�Q�̎d��������ꍇ�A
�M�A�Ȃǂ��g���ĂP�̃��[�^�[�Ŋ撣����A
���ꂼ��̉�]���ɍœK�ȃ��[�^�[���Q�g����
�����ȃG�l�Ƃ����P�[�X������悤�ȋC������ ����Ⴛ����
2�̎d��������Ȃ�2�̃��[�^�[���L��
1�̃��[�^�[���M�A���܂���2�ɂ�����ǂ����Ă������ő������N���� ���̓~�j�l��p�̃��[�^�[�ł��A2����]�I�[�o�[�̃��[�^�[�������Ă���B�~�j�l��p������A��@�̉H���ɂ͔�͂����ǁB �d�Ԃ�vvvf�݂����ɖ炵�Ă�l�͗U�����[�^�[�ł����H
����ev�͓������[�^�[�ł����H
�Ƃ��ɑ��x���ǂ�����Đ��䂵�Ă�̂��C�ɂȂ�̂ł��������ς� �A�N�Z���̓��ݍ��݂ɉ������g���N��������悢 >>889
>�d�Ԃ�vvvf�݂����ɖ炵�Ă�l�͗U�����[�^�[�ł����H
�炵�Ă�l�ɕ����Ă���@��ʘ_�ł͓������Ȃ�
>����ev�͓������[�^�[�ł����H
ev�̂��ׂĂ��������[�^�[���Ƃ����͔����
���}�n�̃j���[�X������Ɖi�v���Ζ����^�������[�^�[�Ƃ���
>�Ƃ��ɑ��x���ǂ�����Đ��䂵�Ă�̂��C�ɂȂ�̂ł��������ς�
��{�I�ɂ̓��[�^�[�ɗ����d�����g���N�ɔ�Ⴗ��B
�K�\�����G���W���Ԃł���A�N�Z���y�_���̓��ݍ�����B
�g���N�͉����x�ɔ�Ⴕ�A���x�̓g���N�̐ϕ��l���B
���Ȃ킿���x�����炩�̕��@�Ō��o���ēd���𑝂₵���茸�炵���肷��Α��x�𐧌�ł���B
���Ȃ݂Ƀ}�u�`���[�^�[���d���ʼnꍇ�̓��[�^�[�̋t�N�d�͂���]���ɔ�Ⴗ��̂�
��]���i���x�j���d���d���ɔ�Ⴕ���Ƃ���ŏ���Ƀo�����X���Ă����B 1980�N��AEV�����ɂ͗U�����[�^�����ɍl�����Ă���
����́A�u���V�t�������@�Ɣ�ׂău���V�����������e�t���[�Ȃ���
���ɁA�R�M���O�������A������ꂽ�ۂ̉߉�]�ɂ��N�d���̔����������Ƃ�������������
��������Ɨ㎥�d�����s�v�ŁA��r�I����������������
EV�p�Ƃ��ẮA�����ɍ����\�Ȋ�y�ގ��̑ϔM�������ǂ��ꂽ��ɁA
���ߍ��ݎ��Ό^���[�^�̐v��CAE���������ꃊ���N�^���X�g���N����藘�p�ł���悤�ɂȂ������ߌ��݂Ɏ��� �Ԃ̃X�e�A�����O�ȂǁA���[�^�[�Œ��ڐ��䂷��̂͊�{�I�Ȑ��䂾�Ƃ͎v������
�X�e�A�����O�Ƀg���N���┽�����`���
�p���[�A�V�X�g�Ƃ����d�g�݂����܂����킩��Ȃ�
���̂ǂ����ɒe��������������
���̎��̍����ł��ǂ�Ńg���N���m���Ă�̂��낤��
�����Ē��ׂ��ɍ��A�����Ă� �g�[�V�����o�[�n���g���ăg���N��ψʁi�ʑ����j�ɕϊ�����Ƃ����̂͂����ǂ݂����A
�M�A���œ`�B����ꍇ�Ƀg���N�Ő����锽�͂����o����\��������A������Ă��̌��� ������K������Ȃ��ƌ������U���A���U������ �������ȁA����̃t�B�[�h�o�b�N�Ɣ��U��̃t�B�[�h�o�b�N�͎���d �X�e�A�����O�̔��U����
�A�N�Z��(�����x)�̔��U��肨���܂�����
�A�N�Z���Ȃ�܂��]�ʼn���Ԃɍ������萔 >>896
���U����ƈ��肷��
�������Ɣ��U����
���肦��T������
���肦��T������ ���������ǖ��ʂ����
���������̂̐ςݏd�˂Ŏԑ̉��i���オ���Ă�
�����N���X�X�e�A�����O�i�n���h���`��̃Q�[���p�b�h�j�ł����悗 �{���́A��p�ԂɃp���X�e��AT�̂悤�Ȏ����A�V�X�g�@�\��������
�K������^�]�҂����̂��Ɠ����I�ʂł���
�\�͕s���������̎��̂����点����낤��
��җ���̌���������ŗX���ی�
�݂����Ȗ��ɂȂ�낤���� ���āA�J�Ԃ̃p���X�e�͂����������B�Ō��ʂ́A�������ꂽ��� �d���A�V�X�g���]�Ԕ��U�����đ����}�b�T�[�W�o�C�Z�R�[ �U���d���@�̉��ۂɂ��Ă̎���ł�
���������@���ŏ��p�^�]�̏ꍇ�A�݂�ׂɂ����
�d���@�ɂ͉��ۂ�����(s>0)���A�d������
�d���������ƐF�X�Ȗ{�ɏ����Ă��܂���
��̓I�ɂǂ̗l�ȓd��(���g���A�ʑ�)��
�d�����ɕԂ��ė���̂ł��傤���H�H�H >>908
�������x�ȏ�ʼn̂ł��ׂ肪���is<0�j�ɂȂ�
������H�͓d���@�Ɠ����Ȃ̂�s<0�Ƃ��Ă��̂܂܌v�Z����悢
���g���͓d���Ɠ���
�ʑ��͔��d�@�Ƃ��ĕK���i�� >>907
���肪�Ƃ��������܂��B����t�ł����˂��݂܂���
���g���͓����Ői�ݓd���ł����E�E�E
�ƂȂ�Ɠd���@���̂��G�l���M�[���Ƃ���
�����Ă����ł͖����Ƃ��������ł��傤���H
�i���R���f���T�݂����ȏ�ԂɂȂ�H�H�H
������Ɨǂ������ł��܂��� >>908
�u���d�@�Ƃ��Đi�݁v�͓������d�@�̐i���^�]�Ɠ����Ӗ�
�u�i�݂̖����d�͂��v���u�x��̖����d�͂�����v
�Ȃ̂ŃR���f���T�ł͂Ȃ����A�N�g���Ɠ�����p�ł�
�U���@�����x�ȏ�ʼnɂ͎�����g���N���u�����v�Ȃ���Ȃ炸
���̎����͂��d�C�I�o�́i�L���d�́j�Ƃ��ďo�Ă䂭
����͓����@�ł������@�ł�����
�d���ɂȂ��ŋ��肵�Ă���Ƃ��͓d���@�ł����d�@�ł��Ȃ�
�����~�߂�悤�ȗ́i���ׁj���|����Ɠd���@�Ƃ��ē���
������葬���悤�ɗ͂�������Ɣ��d�@�Ƃ��ē��� �X�e�b�v���[�^�[�̎��Ƃ���6.35mm�Z�p���̃t���L�V�u���V���t�g��A���������̂ł���
�ϊ��A�_�v�^�݂����Ȃ��̂��Ďs�̕i�ŗ��ʂ��Ă܂���?
3D�v�����^�Ŏ��삷��Ηǂ��̂ł����A�s�̕i�œ���\�Ȃ炻��ōς܂����Ǝv���Ă܂�
https://www.��liexpress.com/item/1005002530796509.html
���Ȃ݂Ƀ|�[�����u���C���h���X�}�[�g������̂��ړI�Ȃ̂ł���قNj��x�͂���Ȃ��ł�
�u���C���h���̃|�[���ƃt���L�V�u���V���t�g�̃W���C���g����3D�v�����^�Ŏ��삷��\��ł� �ǂ����ȃp�[�c�������܂���
���ȉ������炵�܂���
https://www.��liexpress.com/item/32874492868.html http://shelf3.bookpark.ne.jp/pdf/view.asp?site_id=IEEJ&;pg=3&of=IEEJ-GH1368&nf=view&st=IEEJ706&fs=dee199071600f2b8af42bd2e17a8ceae&ct=&ms=
http://shelf3.bookpark.ne.jp/pdf/view.asp?site_id=IEEJ&;pg=3&of=IEEJ-GH1259&nf=view&st=IEEJ706&fs=4c444480cfea4429e2368bfbf206c63b&ct=&ms=
http://shelf3.bookpark.ne.jp/pdf/view.asp?site_id=IEEJ&;pg=3&of=IEEJ-GH1195&nf=view&st=IEEJ706&fs=1cc3c65a9fbe7646f91fd706c5e6cfec&ct=&ms= http://shelf3.bookpark.ne.jp/pdf/view.asp?site_id=IEEJ&;pg=3&of=IEEJ-GH1476&nf=view&st=IEEJ706&fs=58559f2bfd9cd696601a4126ee3033c3&ct=&ms=
http://shelf3.bookpark.ne.jp/pdf/view.asp?site_id=IEEJ&;pg=3&of=IEEJ-GH1321&nf=view&st=IEEJ706&fs=a3f815bdc4d6d72adc80334ca334f170&ct=&ms=
http://shelf3.bookpark.ne.jp/pdf/view.asp?site_id=IEEJ&;pg=3&of=IEEJ-GH1169&nf=view&st=IEEJ706&fs=7acc82a6679f1c5a40a9d4bdb667e104&ct=&ms= �X�e�b�s���O���[�^�[�̓u���V���X���[�^�[�̂悤��1������]�����Ă����Ղ�����̂��Ȃ��̂ł��傤���H ���ʂ�bldc�����������Ǖ��ʂɗ���
�P�Ƀu���V�h���[�^�[�̂悤�Ƀu���V���ɂނ��Ƃ��Ȃ����� >>914
�u���V���XDC�ƃX�e�b�s���O�̎����͎����悤�Ȃ��̂���Ȃ���
�g�p�Ɖ^�ɂ���邪��T�h���C�o����ɐ���
����ł�10�N�ȏ�Ƃ��������x��
10�N�ȓ��ɖ�肪�o��̂Ȃ�v�s�ǂ̋^�� ���S�ƌ����Ă���U���d���@�ł�����ɂ͎��������� �X�e�b�s���O���[�^�[�͂ǂ�����H
���ʂ̃��[�^�[����
�M���ʂ����A���[�^�[������ɕςȗ͂�������g�������Ă��肷�銄����������K�X �O�����[�^�[���ău���V���X���[�^�[�݂����ɍ������ł����H
�u���V���X���[�^�[��X�e�b�s���O���[�^�[�͓d�q�H��̂Ȃ������ɂ͉�]��������X�s�[�h��������̂���Փx����������
365���������]���������ł�
�u���V���[�^�[�݂�����+-�Ȃ������]����ȒP�ō������Ȃ������߂̃��[�^�[�����ĉ����� �O�����[�^�[�̓u���V���X���[�^�[�̈��
���̒m����365���ƉΎ��ɂȂ邼 �O���U�����[�^�[�Ȃ�܂��ɂ��������p�r�ɓK���Ă�
�ł��O�{���ڑ��ƎO���d���K�v
�ŎO���d�����ȒP�ɓ���ɂ͐\���K�v������
�_��ɏ��������� ���������̂������ĂȂ��̂ŋ����Ă����Ȃ� >>919
�O�����[�^�[�͓d�C�̒m�����Ȃ��l���������̂���Ȃ����B
�ǂꂭ�炢�̃g���N�Ɖ�]�����K�v�ʼn�]����ς���K�v������̂��Ȃ��̂��B
�����Ŏg���̂����O�Ŏg���̂��A
�������Ƃ͌����Ă�����������͂���̂Ń��[�^�[�����̓�Փx�́H
�����̎���ɓ������邭�炢�Ȃ炻�������T�����Ŏ��₵�Ȃ����� ����@���@�̃��[�^�[����_���Ȃ́H �O�ɐ�@�����ė��p�������Ƃ��邯�ǒ��ŗ�p�p�̉H���Ă���
���͂���Ȋ�p�Ȃ��Ƃł��Ȃ������p�p�̃t�@���݂��Ďg�����v���o �p�r�F���݂����ȍ�����@�B����肽��
���ׁF���̃h�����̏d�ʂ�5�`6kg�ɂȂ�
�g�p���ԁF�������܂ʼnғ�������
https://youtu.be/HmFvyx24Gsk
��@��T�[�L�����[�^�[�ō���Ă݂����Ǖ��׃g���N�H���Ⴂ�݂����Ńh���������Ƀ��[�^�[���~�܂��Ă��܂����B
���Ƀu���V���[�^�[�ō���Ă݂����ǁA�u���V�����Ղ��邱�Ƃ�����Ȃ��Ė��������Ԏg�p����p�r�ɂ͕s�������Ƃ������Ƃ�m�����B
����Ńu���V�����Ղ��Ȃ��u���V���X���[�^�[�̑��݂�����A�������]+�X�s�[�h�������悤�Ǝv�������A�u���V���[�^�[�̂悤�ɒP���ɋ쓮�ł�����̂ł͂Ȃ����m�Ȃ̂Œf�O
��ł��O�����[�^�[�Ƃ����n�͂ƒ����A���g�p���ԂɑΉ��ł������ȃ��[�^�[�̑��݂�m�������A������u���V���X���[�^�[�݂����ɒ������ȃ��[�^�[���Ă������߂ł����́H
�O�{���ڑ��ƎO���d�����ĂȂɁH�O�{�̃R���Z���g�ɍ������炾�߂Ȃ́H
�p�r�ɓK�������m�ł��������郂�[�^�[�������Ăق���
�I���G���^�����[�^�[���ĂƂ����̔����Ă���X�s�[�h�R���g���[�����[�^�[���j�b�g�^�C�v�݂����Ȃ̂��K���Ă�H �������������l�i���邩��ǂꂭ�炢�̕��׃g���N���K�v�Ȃ̂������肽��
100�`500min-1�ʼn�]�������� ���Ɣ퓮���̃v�[���[���쓮�����傫������Ώ������g���N�ŏd�������̂�����ĉ��߂ł����́H �����ς������Ă��ꂽ�̂�
�I�m�ȃA�h�o�C�X������
�����ł͂�߂Ƃ�
�d�C�I�ɂ��@�B�I�ɂ����̋N���� >>926
���m�ł��������郂�[�^�[�Ƃ����Ɩ͌^�p�̃}�u�`���[�^�[�܂ł���
��ؐ@�Ƃ��}���`���@�i���j�A�������͋Ɩ��p�̌C�@��
�R���N���[�g�~�L�T�[�Ƃ��������i������̂ł��������̂̂������߂���B >>930
�͌^�̃}�u�`���[�^�[
����ł͂Ȃ������Ë��_���Ƃ�����
�u���V������Ƃ����đ��X�Ɏ���������̂ł��Ȃ���
�����ɂȂ�Ό�������悢
�d����p���[������Ȕ͈͂��낤
https://youtu.be/HmFvyx24Gsk���������
�����̑��̍\�����猩�Ă����ꂮ�炢�ɂ��Ă����̂�����
���������ᑬ��]�̃g���N�͋��� >>930
�u���V���[�^�[�Ƃ͂��̃}�u�`����̃��[�^�[��775���[�^�[���g�p�������̂ō������
���ʂ̈�����Ȃ�����s�̂̈������Ď��������ǂ��߂��������玩���ō�肽��
���₵���悤�ɂ��̗p�r�̏ꍇ�̕��׃g���N���m�肽��
��@�݂����Ɏ��s�������Ȃ����瑊�k������ ���ƃu���V���[�^�[���Ƃ���ς葁���i�K�Ńu���V�����Ղ��Č������ʓ|����������
�������ŗp�r�ɂ��������[�^�[��m�肽��
��͂�u���V���X���[�^�[�������낤�� �ēx���₵������
�퓮���̃v�[���[���쓮�����傫������Ώ������g���N�ŏd�������̂�����ĉ��߂ł����́H
���̏ꍇ���[�^�[�ɂ����ׂ������Ȃ炢���Ă��Ƃł����́H >>935
���������ɂ���
���O�c�t������
�{�ǂ�Ŏ����Ŏ������Ċw�K����C�Ȃ��̂� >>927
�ǂ̂��炢�̃g���N���K�v���͕����Ă��o�Ă��Ȃ��A>>927�݂̂��m��
100�`500rpm�Ȃ�v�[���[���̌������t����̂𐄏������ >>928
���̒ʂ�
�ア�͂ő����A����A�����͂ł������A�ɂ���̂������� >>933
������̂Ȃ�A���̎��̓d���A��]���ƃ��[�^�[�d�l������A�d���Əo�̓g���N���ǂݎ���͂������A���āH >>934
���錩�邤���Ƀu���V�������Ȃ��Ă��܂����̂Ȃ�A�������Ղɂ������Ƃ������͓d���ߑ��ɂ��u���V�ُ̈���Ղƍl�����ق��������I >>935
�v���[�̘b�͏��w�Z�̗��ȂŏK�����x���̘b
���̂悤�Ȓ�x���̎�������Ă��邩��
�����ō��̖������낤�ƌ�������Ă���B
���[�^�[�̎����ɂ��炭��������Ă��邪�A
��]����ς������̂Ȃ�u���V���[�^�[��
��ԊȒP�B�Ԃ̃��C�p�[���[�^�[�����ău��
�V���[�^�[�ŁA�܂��R�U�T�����̂ł͂�
�������C�p�[���[�^�[�̃u���V�������Ō���
�ɂȂ������Ƃ�����H
�O�����[�^�[�Ńg���N�Ɖ�]���𐧌䂷��C
���o�[�^�[�������ō��ƂȂ�Ɠ�����B
���ꂱ���d�u�̃��[�^�[�����H��v����
�o�傪�K�v���B
�@�B�Ƃ����͎̂��s�Ɏ��s���d�˂Ďg���镨
�ɂȂ��Ă������m�ŁA�s�̕i�Ń_���ȃ��m��
���m�ł��������郂�[�^�[�ō������Ŏ��s��
���ɍ�肽���Ƃ����l�����ґ�߂��邾�B �ӂ��ɃR���N���[�g�~�L�T�[���Ă��āA�������������������������� >>935
����͂����Ȃ��厖�Ȃ̂̓p���[
������Đl�͂ʼn����H
�Z�������̂悤�Ȋ����ŒZ���ԉ邾���Ȃ�200W���x
�����Ɖ������銴���Ȃ�100W�ȉ�
����ŕK�v�ȃp���[�����ς��� ���̃X���A�ǂݍ��߂Ȃ����Ƃ����X�������
�T�[�o�[��Ŏ��ɂ�����f�B�X�N�����݂��Ă�̂��� >>942
����365�������ԉ���������C�ɂ��Ă���ĉ�������������낤
���Ȃ݂Ƀu���V���Ēᑬ�ʼn�]�������ق����͒x���Ȃ���̂Ȃ́H
�Ă��N��>>926�̎���ɓ����Ă���
�݂����Ă邱�Ƃ��Ⴄ���獬������
�Ƃ肠�����u���V���X���[�^�[�̂ق��������Ă̂͊ԈႢ�Ȃ����
����ł���̓����ƉЂɂȂ邩�������R���Z���g�����Ȃ��Ή�]�Ƒ��x�����ł���L�b�g����������
�g���N�͂�������Ȃ��Ă��q�h�E���̃v�[���[��傫������Ή�]���x���x���Ȃ邯�ǃg���N�����Ղ�����ĉ��߂ł�����H
�����瓮��̃h�����ɂ͂���ȃo�J�ł����v�[���[�����Ă���� �g���N�Ɖ�]���x�̊W�͂��̗����ō����Ă�
�p���[�̓g���N�~��]���x�ɔ�Ⴗ��
�ϑ��x�̕K�v���Ȃ�
�l�͒��x�̃p���[�i200W�j�ł悯���
�R���f���T���[�^���g���� >>946
���O�{���ڑ��ƎO���d�����ĂȂɁH�O�{�̃R���Z���g�ɍ������炾�߂Ȃ́H
���߁A�O�{�̃R���Z���g�͎O���d������Ȃ�
���p�r�ɓK�������m�ł��������郂�[�^�[�������Ăق���
�����炳�[�A>>946����]���Əo�̓g���N�����̂��悾����
��]���͂킩������A100�`500rpm����@����e�Ղȃ��[�^�[�͂����Ɖ�]�����������猸�����K�v�Ȃ� >>946
�����Ȃ݂Ƀu���V���Ēᑬ�ʼn�]�������ق����͒x���Ȃ���̂Ȃ́H
��T�ɂ͌����Ȃ�
���[�^�[�̑̊i���猩�ăp���[�A�g���N�A��]�����������A�y���ʼnĂ���Ȃ�͒x��
�I�[�o�[�g���N�ʼn�]����������d���������Ă��܂��Ă���Ȃ�͑���
���Ƃ肠�����u���V���X���[�^�[�̂ق��������Ă̂͊ԈႢ�Ȃ����
�ǂ��E�����A�������E�������A�[���E�C�`�ł͌��Ȃ�
������ł���̓����ƉЂɂȂ邩�������R���Z���g�����Ȃ��Ή�]�Ƒ��x�����ł���L�b�g����������
�����ǂ����낤�ƁA�ЂɂȂ��Ă��f���̏������ݎ҂͐ӔC�͎��Ȃ������Ȃ� ���ȁA�d���낭�낪��]���̃C���[�W���߂��Ǝv���� �g���N�Ȃ�ĕ��ʂ킩��Ȃ�����Ȃ�
���ʂɂ��Ă������C���œK���Ɏ��������Ȃ����A�����i������Ȃ炻���̃J�^���O�X�y�b�N����\�z���邵���Ȃ�
���������炻������Ă�邯�ǁA���Ẫh����������@���肵�Ă��̂܂g���̂������Ǝv���ȁB����͂ނ肾�낗 >>946
775���[�^�[�ŏd�ʂ�5�`6kg�̃h�����ɐ��ƈ��̂悤�ȃ��m��
����Ė��������ԉ������炻��Ⴗ���ɉ�ꂻ�����ȁB
>>941 ���w�E���Ă���悤�Ƀu���V���[�^�[�����炷��������
�Ȃ�Ƃ������́A���ׂ̂����߂��i�d���̗����߂��j�Ƃ���
�g�����̈����ɖ�肪����Ƃ͎v�����B
�u���V�������Ƀ_���ɂȂ�ȊO��775���[�^�[�Ŏg�����ɂȂ���
�̂Ȃ�A�I���G���^�����[�^�[�̉c�Ƃ���ɍw���������Ƃ���
���ƂŁA775���[�^�[�̑���Ƀg���N�I�����I�Ɏg�����̂ɂ�
�肻���������Ă݂�Ɨǂ����낤�B
�����ł���ȏ㕷���Ă��I���G���^�����[�^�[�̎g�p�o���҂�
���炸�K�ȉ��Ȃ����낤�B
�O�����[�^�[�̘b�����łɉc�Ƃ���ɕ����Ă݂�Ηǂ��l��
��F�X�����Ă���邩������Ȃ��B >>951
����ɂ��鎩�]�Ԃ̃z�C�[���ʼnȂ�A
�z�C�[���Ƀ��[�v�������t���Ă˂���ň�������Ώo�܂���
�ۑ肪����Ƃ���ƁA���̂̃t�@���݂����Ȃ��̂������]����2���Ⴞ���
���]�̉�]���܂ŏグ�邽�߂̏��������ƃ��[�v�������K�v >>946
�I���G���^�����[�^�[��HP��AC�X�s�[�h�R���g���[�����[�^�[��
���Ă݂����ǁA�C���_�N�V�������[�^�[��o�[�V�u�����[�^�[
�ɁA���x���o�p�̃��[�g�W�F�l���[�^�i�𗬔��d�@�j��g�ݕt��
�����[�^�[�A�Ƃ���̂ł��Ȃ���������S�z���Ă���u���V���[
�^�[�ł͂Ȃ��悤���B
���p�Ⴊ�x���g�R���x�A�Ȃ̂ň�@�ɒ��x������Ȃ��B
���̓p���[�ʼn����b�g�̃��[�^�[��I�Ԃׂ����A����͍��܂�
�̏��͔��f���t�����˂邪�A�Ƃ肠�����u��͏����˂�v
�ł͂���ȁB ���܂���������H�������炦�邩������� >>955
���{�̓d�C�d�q�Y�Ƃ͐��ނ����܂�������
���ꂩ��͔_�ƂɊ撣���Ă�����Ƃ�
>>956
���܂�����������R���� ID:ARxDfLCI
ID:O+FwD9vs
���肪�Ƃ��Q�l�ɂ��č���Ă݂��
�ł����瑺�Ŏ��n�������ƈꏏ�ɂ������� >>958 ���҂��đ҂��Ă��B�������F��I ����@����������̂��ǂ��̂ł́H �A���~�X �R���N���[�g�~�L�T�[ �܂����Y AMZ-25Y
�u�����h: �A���~�X(Alumis)
5���̂���3.8 20�̕]��
���i: ��16,900 ����Ȉ����̂��B�~�����Ȃ�ȁB����Ȃ����ǂ� >>962
�Z���u�Ȃ̂��H�����̂����邼
���� �l�Q��@ KNU1007-10 �O���@200V
���[�J�[��]�������i 680,900�~�i�ō��j �ȑO���������ނ̕��̓p�^�[���`���ꂽ���f��Őϑw���Ă� �u���V���[�^�[�ƃu���V���X���[�^�[�͊O�����猩���������邱�Ƃ͂ł��܂����H
�������̂���������������Ē�����Ƃ��ꂵ���ł�
�@�B���番���������[�^�[�̎�ނ��m�肽���ł� �u���W�R���@���[�^�[�v�ł����� >>966
���g��������Ƃ���܂ł点��Ȃ�
�u���V�̗L�������邗 ���������Ƃ��킩�邾��A�Ӓn������w �Ȃɂ����Ă�́H��
�u���V�����^�C�v���ƊO���炶��킩��Ȃ���
�Ԃ炵�u�������ł���^�C�v���ƊO����킩�邯�ǂ� ���łɌ����Ƃ��ƁA�����H�����̃u���V���X�ŁA���[�h���Q�{�����o�ĂȂ��Ȃ�Ă̂�
���ʂɂ���� �͂��͂��A�}�L�\���̓G���C�G���C
�@�B���番���������[�^�[���X�e�b�s���O���[�^�[��������ǁ[���܂���? ���Ă��҂��[���[�̓u���V���X NEMA�Ƃ��}�u�`���[�^�[�Ƃ�pc�t�@���Ƃ��A�悭�����͌`�ŕ����邯�ǂ�
�ςȓz�ɂȂ�Ƃ����ς�킩���
���ǂ͕p�o���o���Čo���l���߂邩�^�Ԃ����邵���Ȃ���E�E�E ���l���炢�̃��x���ɂȂ�A����킩��� ���`�`�`�`���`�`�`�`�`�`�ł����`�`�`�`�` ���[�^�[�̉摜����p����̂���ԑ��������Ƃ����I�`���B >>981
�������̂�����������͖̂����Q�[������A�q���g�ɂ͂Ȃ��B �����Ă��̂͊O���ŕ������
�ł����������̏o�Ă����炨��グ
�[�q��4�s���B�����炸���������瑸�h����
https://i.imgur.com/5UBFEf9.png �u���V���X���[�^�[����A�u���V�̃X�y�[�X������ �X�e�b�s���O���[�^�[����Ȃ����� ���܂��ܓ��^�̃u���V���X�������Ƃ��邩�炻���̓u���V���X�����Ďv����
�G���̃u���V���[�^�[���ƃu���V�����ƕ��s�ɂ��Ă��肷�邩��
�u���V�̃X�y�[�X�͗]�T�ł���Ȃ� �������[�^�[���L�`�ł̓X�e�b�s���O���[�^�[�Ƃ����� �u���V��������ΑS���u���V���X����A>>974�ɂ���w >>989
�u���V�̃X�y�[�X���Ȃ��ւ̃��X������ �@�B������o���ĂȂ��A����
>>991�������Ď��o���Ă��� ���Ȃ��ɂ킩��Ȃ����Č��������̂�
�͂����ǂ��� >>994
�]������`������A�̂� �����͗c�t�������x���̃X���ɂȂ��Ă��܂���
�N�̂�����
�킩��� �����
����
��
����
����
����
����
���� ���̃X���b�h�͂P�O�O�O���܂����B
�V�����X���b�h�𗧂ĂĂ��������B
life time: 1342�� 7���� 25�� 5�b 5�����˂�̉^�c�̓v���~�A������̊F���܂Ɏx�����Ă��܂��B
�^�c�ɂ����͂��肢�������܂��B
��������������������������������������
�s�v���~�A������̎�ȓ��T�t
�� 5�����˂��p�u���E�U����̍L������
�� 5�����˂�̉ߋ����O���擾
�� �������K���̊ɘa
��������������������������������������
����o�^�ɂ͌l���͈�ؕK�v����܂���B
��300�~���瓽���ł��w�����������܂��B
�� �v���~�A������o�^�͂����� ��
https://premium.5ch.net/
�� �Q�l���O�C���͂����� ��
https://login.5ch.net/login.php ���X����1000���Ă��܂��B����ȏ㏑�����݂͂ł��܂���B






