◆【モータ】電力・電気機械の質問・雑談8【発電機】
レス数が900を超えています。1000を超えると表示できなくなるよ。
. A \ ヤケテルゾ ゴルァ!!
─<|x|>、 \ ∧∧ / i | /
─<|メ|>、\ \ (,,゚Д゚) / ⌒ヘ `、ヽ. /
─<|メ|>、\\ \ / つつ l、◎__l__`・、` . / =||=
... .|X|. \\\ \ 〜(__) )─(  ̄ ̄ ̄~./....彡||ミ
.. .|×|. . \\\ \ ∧∧∧∧∧. / ||[] o
|.×.| _f_f_f_ \ <高圧キケン>. / || 口\
. | × | | ≡≡≡.|. \ < /'''''''Z .>/ || /司─┐
| .×. |. | ||| ||| ||| | < / / .> || └0─0
――――――――――――< 7 フ >――――――――――――
★電力(発電所・変電所・. < 7 / >★各種電動機・発電機・変圧器等
送配電・受電)等. <. '~ > 及び制御方法・制御機器・応用機器
∨∨∨∨∨
★パワーエレクトロニクス、電動力応用機器、電機材料、等々
★マブチ・小型サーボ・大中小型モータ、PWM・インバータ制御等々・・
どんどん書き込んでください!
*強電系学生や電験受験者の質問もどうぞ*
前スレが消えていたので、立て直しました。
最近にわかに話題だけどそもそも4年も前のエントリだぞ エンジニアってメカニックとかじゃねーの?
メカに強いオッサンは電気弱い説
逆も然り DCブラシレスモーターとロータリーエンコーダーの信号を使って、
ステッピングモーターのような1パルス毎の位置制御ができるでしょうか? どう制御するかは置いておいて原理的にそのブラシレスモーターの極数分のステップ角でしか位置制御できないのでは? ブラシレスの極数による角度より細かい位置に置くには、
常に電流を流し続けるのでしょうか? 1度程度ならオブザーバー使ったベクトル制御で可能ってドライバ屋さんが言ってたな
レゾルバかエンコーダがあれば1桁精度上げられるが市販のサーボパック買った方が早いと言われた
負荷によってはステッパーと喰い合う領域だよな ベクトル制御ではない正弦波駆動の存在を知ったのですが、センサの60度毎パターンによって通電相を切り替えていく120度通電の応用でしょうか?
正弦波はどのように生成するのか原理が知りたいです
現在速度から次のセンサまでの正弦波波形を推定してPWM指令値とするのでしょうか?
センサ割り込み毎に補正されて波形が歪そうな気がしますが pwmで正弦波電圧をふぃーどふぉわーど的にくわえるだけ
応答性も上げたいなら常に力率賀久を監視して0になるように制御すればOK 正弦波から歪んだ分(高調波)はリップルあるいは鉄損に変換される 分数スロットモータ使用すれば矩形波入力でも十分高調波無くなる DC-ACインバータ(正弦波方式)や、D級オーディオアンプ等と同じだね。 推定角とセンサ角度がずれるのはどう補正するのでしょうか
例えばローターは59度で、推定角は57度だと、ローターが60度になった際は正弦波位相が57度から60度に急変すると思うのですが。
正しい角度情報はホールICの60度毎でしか得られませんよね? だから力率角の符号見て入力電圧を進めるのか遅くするのかを制御すれば良い
ふかんたいは6次のリップル要因になるだけ ベクトル電流制御の非干渉制御って、電圧方程式の左辺Vdqに右辺の干渉項を予め足してといて相殺するってことですよね?
なら、干渉項だけじゃなくて電圧降下分も予め足しておけばよいのにPI制御とするのは何故ですか? 目標値とFB値の差分(積分器、微分器含む)が定常状態では0となるようにブロック作ってんのになんでわざわざそんなことする必要がある? なぜフィードバック制御が必要か、フィードフォワード制御だけで十分じゃないか、と、そういうこと? FBは必要だけど、干渉項と電圧降下項が分かってればP制御でいいような気がしたので聞いてみました 電圧方程式とやらの形もわからないから憶測で言うしかないけど
その項を全く誤差なく求めることはきっと不可能だし、インバータも厳密に制御出力どおりの電圧は出せないだろうね 精度満足できるならそれでいんじゃね
FB取り入れるかどうかは仕様で決まるはなしだから、あーだこーだ言っても意味がない パワー半導体絡みで質問です。
npn型パワーバイポーラトランジスタは、ベースに流す電流を変化させて、エミッタから
コレクタへ流れる電流を制御する
という問は、正解でしょうか? 誤りでしょうか?
その理由も教えて頂けると幸いです。 正弦波PWMで三角波比較で変調すると、線間電圧は電源電圧の0.866倍までしか正弦波を出力できないとありました。
第三高調波電圧を重畳すると電源電圧の1倍まで出力できるらしいのですが、意味がわかりません。
インバータの中点を電源電圧の1/2とした場合、線間電圧は√3倍なので0.866なのはわかりますが、そのあとの1倍にする原理と数式はどういうこもなのでしょうか。 >>848
・・・と自分も思ったのですが、どうもこれは「正しい」という扱いらしいのです。
そこに書いた事自体は記入ミスはありません。なので、これが正しいと思われる理由が知りたいのですが
ネットで調べても、やはりそのように書かれてることはありません。
出題自体のミスの可能性を考えているのですが・・・。 >>849
中点電位をずらすって原理だったが、式からの導出はわからん ↓で質問してみたのだが解答がまだ来ないのでここでも問い合わせ
【トルク】 モーター何でも相談室 【回転数】
http://rio2016.5ch.net/test/read.cgi/denki/1514265916/ 上のスレでもしたご質問です。
よく一般にSPMモータはリラクタンストルク発生しないとか、凸極性がない(Ld=Lq)と言われていますが、これは本当なのでしょうか?
一体どんな理屈でSPMモータはLd=Lqと言われているのか、ご説明を聞きたい。
感覚的な経験則に基づく説明ではなく理論的な証明を見たいです。 フルブリッジ回路でdcモータを
駆動しようとしていて保護回路も
つけたいと思ってます。
突入電流と過電流の保護回路を入れたいです。
突入電流と過電流の違いと
それぞれの保護回路を教えてください。 突入はソフトスタートで起動させる
要はduty制限
過電流はシャント抵抗で電流を検出 スマホ本体のワット数の出し方を分からないんだけど
液晶つけたら2,7wだからこれでいいのか?
使い方でワット数変わるからむずい バッテリー消費電流分かるアプリ入れて測ってみた
リチウムイオンバッテリーって3.7Vだっけ?
ディスプレイ最小輝度で300mA×3.7V≒1W
最大輝度で0.5A×3.7V≒2W
だったよ ユニークで個性的な確実稼げるガイダンス
暇な人は見てみるといいかもしれません
グーグルで検索するといいかも『ネットで稼ぐ方法 モニアレフヌノ』
JPV9O エアーコンプレッサーのコンデンサが壊れたので交換しようと思ったらcmeの物が無くcmksしか売ってないのだけど使って大丈夫でしょうか? ベクトル制御の本にありがちなのだが、モータのエネルギー保存則書いてない本多くね?
別に制御に関係ないのかもしれないが、高効率制御を唄ってるくせに電力の話全くないとかありえんわ。 エネルギー保存則なんて作れるわけないだろ
モーターにおける高効率ってのは入力した電力と機械出力の比のことだぞ
それ以外は銅損と鉄損になるんだから測れるわけないじゃん
漏れ磁束はいくつか機械出力はいくつか
機械損失はいくつか熱になる量はいくつか
電圧と電流はいくらか※1供給される電力の力率はいくつか
モーターのエネルギー保存則を考えるならこれらすべてを
完璧に定義しなきゃならない
しかも物によっては磁石の熱耐性についても考慮しなきゃダメだ
考慮する項目が3つ多くて4つまでならなんとかなっても
5個も6個も項目を考えなければダメな物体のエネルギー保存則なんて
誤差だらけでゴミしか出来ねえわ
そもそもの話じゃ物理学的にはいつ爆発しても
おかしくないほどの高エネルギーがモーターに集中するらしいじゃん?
それでも成り立っちまうおかしなところだらけの物体に
物理法則なんて成り立つと本気で思ってるの?
※1(モーターは外見上オームの法則が成り立たないため比較するなら決めなければならない) >>872
機械出力/電気入力の比が高い=高効率
=鉄損・銅損共に低いのに出力がデカい 実はモーターの鉄損銅損は測定出来ないため概算になる
(回転していなければ発生しない値だし、測定したくても
回転をしているものを測定出来ないから概算を使う)
おおよその鉄損銅損は計算できるから目安で計算しておく
そのあと、モーターの測定を行って、いくつかのグラフを書く
そのグラフから鉄損と銅損の実測値を読み取る
計算した値と比較して実測値を採用する
こうやってモーターは効率が決められる
まあ、大量生産とかだと一々してられないから
誤差の範囲内に入るように作るんだけどね
機械がコイルを巻いてもリアクタンスが
変化するのが厄介なことなんだけども… ちなみに同期発電機は15種類はグラフを描かないと特性がハッキリしないよ(遠い目) >>872
計れるっての
ただ筆者の力量不足なだけ
モータは電気回路なのに力率が登場しないのがよい証拠 >>876
大きな電動機の実負荷試験なんて出来るかよ
すべて計算
定格決めるんだって断熱して温度上昇推定して計算 >>878
そういう話ではない
モータの理論がまだ完結してないと言ってるんだけど 最近の磁気回路計算と数値解析は素晴らしくよく合うぞ
合わないの理論が悪いのじゃなくモデル化が悪い >>880
だからそういうのじゃなくて基本となるモータの基礎理論が不十分だといってるんだが‥
FEM解析の結果は疑ってない 何と戦ってるのかわからん
電気の基礎理論なんて18世紀に完成されていると思うが >>882
電磁気の基礎ではなくモータの基礎理論が間違えているといっている 2回ほど短い停電が続いたら漏電ブレーカーの感度が良くなっちゃったみたいで
小さいブレーカー全部オフにしておいても漏電ブレーカーが落ちちゃうようになりました
台風だし夜だしで電気屋さん来てくれない
電気工作好きで多少知識あるのでメインブレーカー落として叩いたりいじってて
漏電ブレーカーからでて銅版にネジ止めしてある配線外したらブレーカー落ちなくなりました
この臨時対処は正しいですか 感度が良くなったんじゃなく漏れ出したのではないのかね ぐぐって調べました、銅版に付けてある配線は中性線欠相保護用なんですね元に戻しました
するとまた漏電ブレーカーが落ちたので家のコンセント全部抜き一つ一つ調べました
流し台上の蛍光灯に付属のコンセントが原因でした
素人は怖いですね、勉強になりました あれからまた2度落ちました、仕事にならず困りました
今日電気屋さんが来てくれました、漏電ブレーカーが悪いとの事で分電盤ごと交換してもらいました
通電してる電線をちゅうちょなく引っこ抜く、プロの仕事は速くてカッコいいですね 本当のプロであれば通電中の電線を躊躇なく引っこ抜くようなことはしない >>879
あのさぁ、電気の理論が通用しないことがあるんだから
モーターの理論なんて完成するわけないだろ
電気の理論があてにならないんだから、基盤になる理論がないってことだぞ
つまりは、実測をしなきゃ理論なんて作り出せねえだろうが
あんな高速回転をしてるモーターの電流値やら
磁界の強さなんて測定出来るわけねえんだから、
一生完成なんて無理なんだっつーの >>873
んで?
漏れる分が正確に測定出来ないから
エネルギー保存則を完成させられないんだけど?
>>876
お前マジか
どうやってエネルギー保存則を完成させてるのか教えて >>873をよく見たらID同じだったワロタ
>>890
ブレーカーが落ちるってことは漏電してるに
決まってんじゃねえか危ねえな >>898
漏電してるとは限らない
今回は漏電してないパターン 質問です。
参考書によれば、揚水発電所の発電電動機の起動方法において
半電圧起動方式は(設備が簡素で済むという長所があるものの)
大規模な揚水発電所には「適さない」、らしいのですが
なぜ不適切だという判断になるのか、どなたか理由はご存知でしょうか・・・
検索してみましたが古い資料では広く採用されている、などと表現されていて
(半電圧起動方式が)はやらなくなった理由に到達できませんでした・・・
要約します、半電圧起動方式が大規模な場合に適さない理由をお教えください。 すみません 見つかりました
>系統に与える影響が大きいので、電圧変動に対する要求が厳しくなったそれ以降では、
>新規には用いられなくなった。 別件でも質問です・・・
単三3本でまわるターンテーブルにIC組み込みました。
モーター回さないときは期待通りに動いてくれてたんですが
肝心のモーターを回すとブラシのノイズなのか
リセットICが誤動作しまくるようになってしまいました・・・
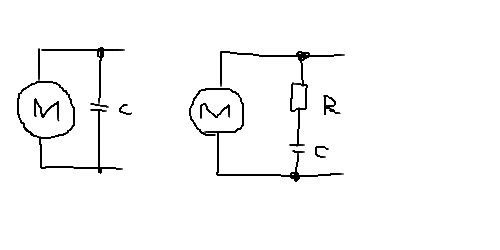
低コスト・少部品でモーターのノイズ削減の方法はどういうやり方がポピュラーでしょうか・・・
モーター//コンデンサ という接続ぐらいしか 私は思いつきませんでした・・・
それとも、右図のように抵抗も添えた方がいいのでしょうか??
 電力関係の質問の後で単三が出てきたから単相三線のことかと思った >>902
電力関係の質問の後で単三が出てきたから単相三線のことかと思った >>902
抵抗なしでまずやってみて。とりあえずは0.1uF
それと、リセットICが誤動作してるんじゃなくて、たぶん電源電圧が実際に下がっちゃってる
のではないかと思うよ。
まずはオシロで波形見てみ? >>904
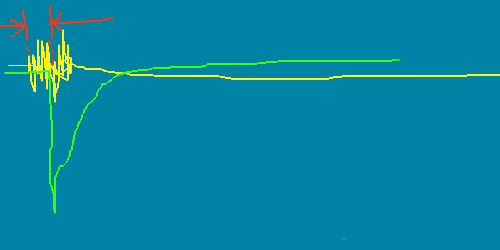
どもっす。 こんな感じでした。
VCC(かモータの電線だったか
忘れました):黄色。リセット信号発生のときに
まいかい、その直前から乱れてました…これが
原因だろうと思い>>902の質問に至りました。
リセット信号:緑、ローアクティブ
お昼に試したときはモータに4.7nFパラに入れたら収まりました。。。
 あとはあれです、
あとはあれです、
VRで回転速度が変えられるのですが
低速にするとリセット間隔が伸びていたので
これはブラシのノイズなんだろうなぁ、と。 >>902で、抵抗を加えるのかなぁ、と迷ったのは、
電気関連の本棚の青い表紙のイトケンシリーズのノイズの話という本を
昔本屋で立ち読み/斜め読みしたときに、ノイズ対策は
抵抗分でエネルギーを吸収してやらなきゃアカン、てな
ニュアンスの文章を読んだようなあやふやな記憶によるものです・・・
結局その本は買ってませんサーセン 質問です。
揚水発電所におけるポンプ水車発電電動機の、
揚水時の始動方式(のひとつ)に「サイリスタ始動方式」が、ありますが、
機能的な面からはこれは可変速揚水発電システムにおけるサイクロコンバータそのものである気がするのですが
両者が一致しないケースもあるのでしょうか??
質問を要約します。
サイリスタ始動方式は、サイクロコンバータ以外にも存在しますか? サイリスタ始動はブラシレスモータに近い
ゼロから同期速度まで加速しなければならないのでサイリスタインバータが多いと思う 質問です。
具盾木数値までは問いませんので傾向で構いません、リラックマってリラクタンス大きいんですか?小さいんですか?(^p^) しつもんです。
誘導電動機は、「同じ交流電動機である同期電動機と比較して脱調することがない」 って
教科書には書いてありますがまじですか?
マブチモーターみたいなサイズのちっちゃい誘導電動機を作って、
それをアーノルドシュワルツェネッガーみたいなマッチョマンが無理やり回しても
脱調させられないんですか? にわかには、しんじられません! どうしてですか?! 脱調は同期外れのことだった気がするので
そもそも同期してない誘導機に脱調という言葉を使うのは適切なのだろうか すみません、コピペ元は教科書じゃなくてwikipediaでした!
(普通に考えれば、エンジンブレーキ時などの)停動トルク以上の負荷に晒されれば
回っちゃいますよねぇ・・・ 脱調しないとか正直、信じられません!! (電気機器学 電気学会 オーム社 1995、九刷 P112より抜粋)
# 同期機では同期速度で運転することを前提にしている。したがって、
# 電気子巻き線によって作られる回転磁界と界磁極との間に相対運動はない。
# しかし、外乱によって、同期速度を中心に、回転角速度に位相変動が誘起されることがある。
# この位相変動が同期機固有の復原力と相互に作用して、位相角振動を起こす。
# 条件によっては、振動が増大する不安定状態になり、同期速度からはずれて運転できなくなることも起こり得る。
# これを脱調(pull out)という。
なるほど! 誘導電動機なら停動トルクを超える負荷に晒されても
逆回転する軸にトルクを加え抗い続けることが可能なんでしょうねぇ・・・ お騒がせしました!! >>915
3相誘導電動機ならそうだけど
単相誘導電動機の場合はそんな単純でもないよ。 >>915
それ制動機領域
逆相制動のときそうなる
吸収したエネルギーはすべて回転子で熱になるので大変なことになる さっそく制動機領域なる用語をググったら技術評論社の
>最新小型モータが一番わかる --基本からACモータの活用まで--
ってほんのサンプルが出てきて電池側に充電されて回生制動としてふるまうような文面みたいだけど
「回転子で熱になる」というのはどこソースの議論でしょうか・・・ s<0が回生でs>1が制動というかプラッギングだと思ってたんだが レス数が900を超えています。1000を超えると表示できなくなるよ。



